 带微控制器驱动M35SP-9步进电机的制作
带微控制器驱动M35SP-9步进电机的制作
步骤1:PCB
为了驱动步进电机,我使用了一个继电器板,我制作了几个月早。它由3个继电器组成一个H桥(对于不知道那是什么的人,它是一个电路,它允许一个电动机或多个电动机在两个方向上转动)
并不是我可以做到的最好方法,但是由于我已经把它放好了,所以我决定使用它。
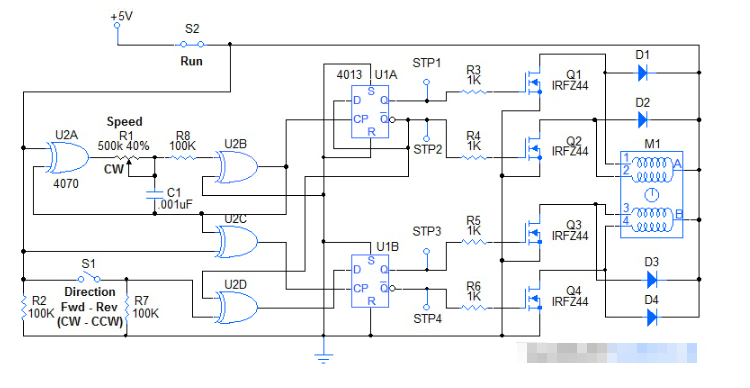
我的设置包括1个继电器,带有2个用于改变极性的开关触点
和2个继电器,用于接通/关断每个绕组
如果使用继电器则非常重要
》
请确保如果使用继电器,则必须始终使用续流二极管!
否则您可能最终会损坏微控制器,并且电路也会大量失灵。
如果您不知道续流二极管是什么,我建议您用谷歌搜索。
步骤2:测量
使用一个9V的电池为电动机供电,它将消耗约180mA的电流。
因此请确保如果您使用的是步进电动机IC,它可以处理一定量的电流和电压。发布
第3步:编写软件
要使步进电动机正常工作,您需要遵循一定的顺序。
我使用的步进器是双极步进器,这意味着它有2个线圈。
每个线圈有2个连接点
i将通过极性解释您必须经历的阶段。 +/-或-/+:
阶段1:
+/-绕组1
阶段2:
+/-在绕组2上
阶段3:
-/+在绕组1上(反极性)
阶段4:
-/+在绕组2上(再次为相反极性)
对这些相位进行循环,您将使步进电机稳定地旋转
要使电机反向旋转,只需重复上一相
我试图用我所拥有的很少的资源尽我所能来解释这一点,这也是我第一次接受指导,因此请对我保持温柔:p
责任编辑:wv
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
微控制器
+关注
关注
48文章
7565浏览量
151574 -
步进电机
+关注
关注
150文章
3113浏览量
147574
发布评论请先 登录
相关推荐
基于STM32F405RGT6的TMC2660步进电机驱动器,附带原理图+PCB
驱动电路主要包括以下部分,信号接口电路,逻辑控制电路,功率开关电路,保护电路。TMC2660是步进电机驱动芯片,集成了先进的电流



步进电机控制器怎么调速度
引言 步进电机是一种将电脉冲信号转换为角位移的电机,具有控制精度高、响应速度快、结构简单等优点。在自动化设备、机器人、数控机床等领域得到了广泛应用。

中微半导体推出CMS32M67电机控制系列微控制器
中微半导体(深圳)股份有限公司近日宣布,其最新研发的CMS32M67电机控制系列微控制器已正式推向市场。这款微控制器基于先进的Arm Cor
步进电机的微步驱动原理是什么
地移动,并能够实现更精确的定位。 微步驱动原理的核心在于对绕组电流的精细控制。在传统的步进电机操作中,绕组通常被全开或全关,对应于一个特定的





 工商网监
工商网监
评论