 如何编程简单的机器人汽车
如何编程简单的机器人汽车
步骤1:零件清单
首先需要以下部分
1。易于从ebay上以10欧元左右的价格购买的底盘和电机套件链接
2。 arduino板。我用的是从ebay购买的arduino uno R3,价格为4欧元。对于原始链接在这里。要获得价格便宜的兼容链接,请点击此处
3。来自ebay的迷你支架从这里的ebay链接上花费约0.80€(我使用了中号支架,因为我没有备用的mini)
4。 L293D电机驱动器H桥IC的价格约为0.8欧元(来自ebay链接)
5。超声波传感器HC-SR04的价格为0.8欧元(来自ebay链接)
6。电池组(您可以使用四个能提供6V的碱性或NiMH AA或两个能像我一样提供7.2V的18650 AA)
7。 7805稳压器IC(可选取决于电池组)在此处链接
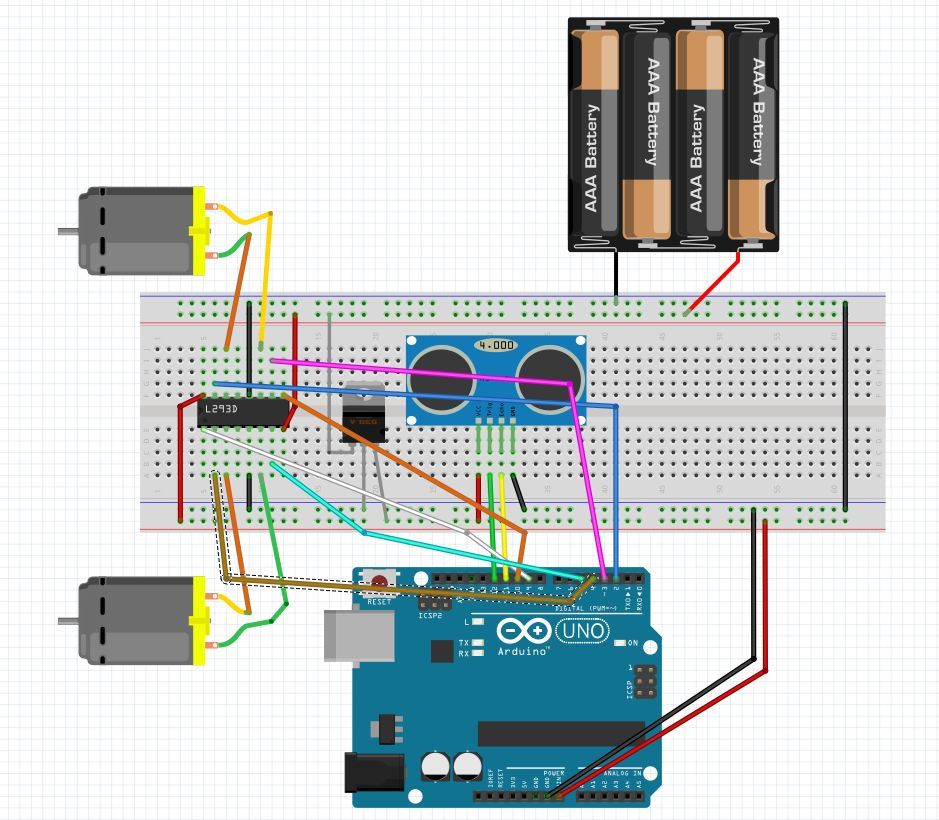
步骤2:连接
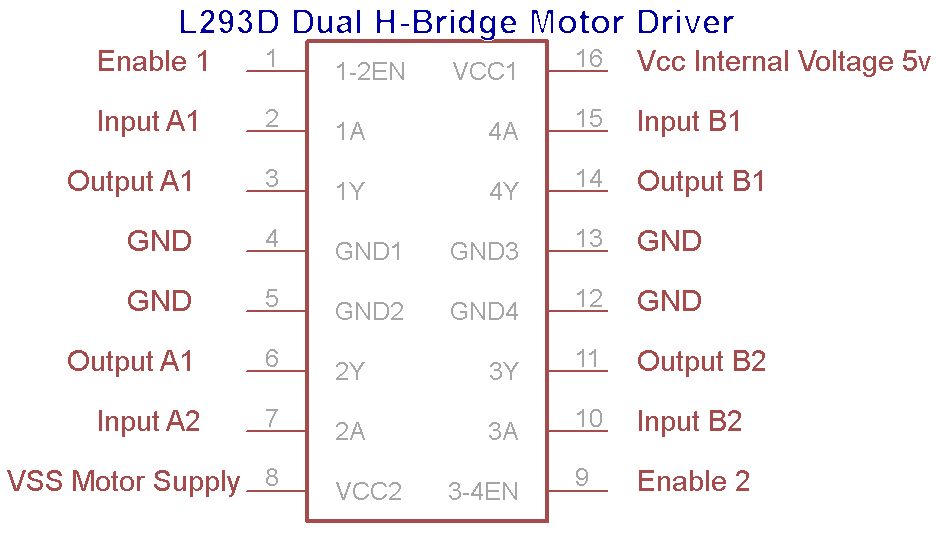
了解L293D双H桥电机驱动器的用法至关重要。/p》
您可以在图中看到两个电动机的连接( 3,6针(电动机A1)和 11,14(电动机A2)因此)。因此,电机连接到这些引脚,并根据arduino草图顺时针或逆时针旋转。但是为了控制它们的速度,您必须使用电动机A1的引脚1使能和电动机A2的 9引脚使能,并从arduinointerwetten与威廉的赔率体系 输出引脚提供电压。这也是一种校准机器人运动的方法,因为电机的质量不是最好的,而且通常一个电机要比另一个电机快。
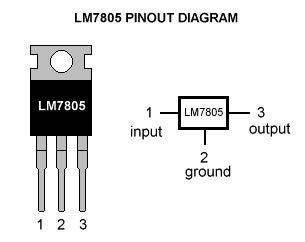
对于电源,如果您使用的电池组超过6V时,您必须使用7805稳压器,该稳压器将为您提供恒定的5V电压来为arduino,L293D和HC-SR04提供电源。从示意图中可以看到,pin1是接地的输入pin2,pin3是5V输出。
如果不确定或担心会燃烧某些东西,最好为arduino提供9V常规电池并从arduino提供5V电压至L293D和HC-SR04,并为电机提供不同的电源。
请检查L293D是否连接到两个电源,引脚16(Vs +)需要5v才能使芯片工作,引脚8(Vss +)需要向电机供电并可以控制更多电源(最大如您在数据表中看到的24V)。 L293D具有相当的弹性,我还没有像其他电子设备一样设法销毁一个,但最好在开始使用实际电压连接之前研究连接。
因此在连接任何东西之前,请先研究原理图《293》
步骤3:Arduino代码
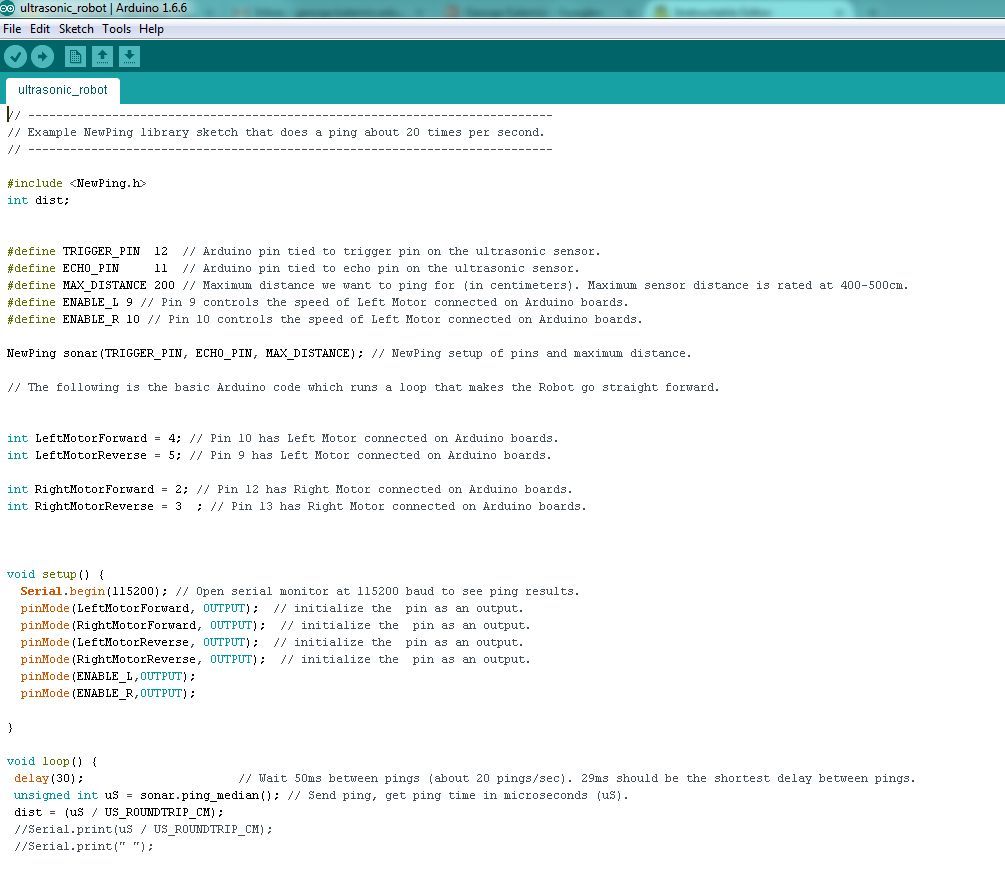
在随附的arduino代码文件中,有每个引脚连接的文档。
您可以看到,取决于机器人快速前进的距离,前进,停止,后退和快退。我正在为HC-SR04使用NewPing库,该库比我对HC-SR04的手动处理更为准确。
您可以使用串行端口以115200波特率测试HC-SR04测量的距离。首先卸下Vss(L293D上的pin8)电缆,以使电机不工作(并且不必将机器人悬空)
如果有速度更快的电机,也有校准电机的文档。
责任编辑:wv
-
机器人
+关注
关注
211文章
28418浏览量
207103 -
编程
+关注
关注
88文章
3616浏览量
93738 -
Arduino
+关注
关注
188文章
6469浏览量
187091
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
焊接机器人编程技巧与注意事项

工业机器人编程流程及注意事项
工业机器人的四种编程(示教编程、离线编程、自增强现实编程主编程)剖析!

柔性机器人和刚性机器人有什么区别?

Al大模型机器人
工业机器人任务编程基本流程
如何使用PLC控制机器人
abb工业机器人的编程语言是什么
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
ABB机器人拓展其免费的Wizard简易编程软件的应用范围






 工商网监
工商网监
评论