 51单片机的数制和指令系统的讲解及制作一个单片机最小系统的概述
51单片机的数制和指令系统的讲解及制作一个单片机最小系统的概述
在讲指令系统前我们先来复习一下数制的概念。
1.十进制(Decimal)
基数是10,它有10个数字符号,即0,l,2,3,4,5,6,7,8,9。其中最大数码是基数减1,即9,最小数码是0。
2.二进制(Binary)
基数是2,它只有两个数字符号,即0和1。这就是说,如果在给定的数中,除0和1外还有其它数,例如 1012,它就决不会是一个二进制数。
3、十六进制(Hexadecilnal)
基数是16,它有16个数字符号,除了十进制中的10个数可用外,还使用了6个英文字母。它的16个数字依次是0,l,2,3,4,5,6,7,8,9,A,B,C,D,E,F。其中A至F分别代表十进制数的10至15,最大的数字也是基数减1。
4、二进制数与十六进制数的相互转换。
(1)、二进制转换为十六进制:
整数部分,从低位开始,小数部分,从高位开始,每四位一组(不够四位的补0),转换为对应的十六进制数。
例:(1 0001 0011.1100 0111)2=(113.C7)H
(2)、十六进制转换为二进制:
将十六进制数的每一位分别转换为对应的四位二进制数。
例:(3E9D)H=(11 1110 1001 1101)B
例:( 2ABE)H= 0010 1010 1011 1110B
以后我们在单片机编程方面采用十六进制,这个请大家注意了!
MCS-51系列单片机的指令系统共有111条指令,其中49条是单字节指令,45条是双字节指令,17条是三字节指令。
MCS-51的指令系统共有33个功能,用汇编编程时只需要42个助记符就能指明这33个功能操作。
1、 指令格式:MCS-51汇编语言指令格式与其他微机的指令格式一样,均由以下几部分组成:[标号:]操作码 [操作数][,操作数][;注释]
标号:又称为指令地址符号,地址的符号化,一般由1到6个字符组成,以字母开头的字母数字串,与操作码之间用冒号分开。
操作码:是由助记符表示的字符串,它规定了指令的操作功能。
操作数:是指参加操作的数据和数据的地址。
注释:是为该条指令作说明,以便于阅读。
注意:[ ]中表示为可选项。操作数可以为1、2、3个,也可以没有。
不同功能的指令,操作数作用不同,如:传送指令多数有两个操作数,写在左面的是目的操作数(表示操作结果存放的单元地址),写在右面的称为源操作数(指出操作数的来源)。操作码和操作数之间必须用空格分隔,操作数与操作数之间必须用逗号“,”分隔。带方括号项可有可无,称为可选项。操作码是指令的核心不可缺少。
2、 指令分类
MCS-51的111条指令分为下面5类:
(1) 数据传送类指令29条,分为片内RAM,片外RAM、程序存储器的传送指令,交换及堆栈操作指令。
(2) 算术运算类24条,分为加,带进位加,减,乘,除,加1,减1指令。
(3) 逻辑运算类24条,分为逻辑与、或、异或、移位指令。
(4) 控制程序转移类17条,分为无条件转移与调用,条件转移,空操作指令。
(5) 布尔变量操作类17条,分为数据传送、位与、位或,位转移指令。
3. 指令代码:
(1) 数据传送类
MOV 传送数据
指令格式:MOV A,#DATA;将立即数DATA送到累加器A中。
例:
MOV P1,#11111110B;把立即数11111110B传送到P1口。
MOVX 片外数据存储器传送数据
指令格式:MOVX A,@DPTR;将DPTR指向的地址单元中的内容传送至A中。
例:MOV DPTR,#1000H;将地址1000H传送到数据指针DPTR中。
MOVX A,@DPTR;将DPTR指向的地址单元(1110H)中的内容传送至A中。
MOVC 程序存储器传送数据
指令格式: MOVC A,@A+DPTR;
例:MOV A,#00H
MOV DPTR,#1000H;将地址1000H传送到数据指针DPTR中。
MOVC A,@A+DPTR;把累加器A的值和DPTR的值相加得到值作为地址,把这个程序存储器的地址单元中的内容传送到A中。
(2) 算术运算指令
ADD 不带进位的加法类指令
指令格式:ADD A,#DATA;把立即数DATA和累加器A的内容相加得到的值存放到累加器A中。A+DATA→A
例:
SETB C;让累加器C置1
MOV A,#01H;A=01H
ADD A,#01H;A=02H
ADDC 带进位的加法类指令
指令格式:ADDC A,#DATA;把立即数DATA和累加器A的内容相加,再加上进位标志C得到的值存放到累加器A中。A+DATA+C→A
例:
SETB C; 把累加器C置1
MOV A,#01H ; A=01H
ADDC A,#01H; A+DATA+C→A ,A=03H
SUBB带借位的减法类指令
指令格式:SUBB A,#DATA;把累加器A的内容减去立即数DATA再减去进位标志C得到的值存放到累加器A中。A-DATA-C→A
例:
SETB C; 让累加器C置1
MOV A,#03H; A=03H
SUBB A,#01H; A=01H
INC加一指令
指令格式:INC A ;把A的内容加1再存储到A中。
例:
MOV A,#01H;A=01H
INC A ;A=02H
DEC 减1指令
指令格式:DEC A ;把A的内容减1再存储到A中。
例:
MOV A,#03H ;A=03H
DEC A ;A=02H
(3) 逻辑运算指令
CLR 清零指令
指令格式:CLR A ;把A的内容清零再存储到A中,A=00H。
MOV A,#00000001B;A=00000001B
CLR A ;A=00000000B
CPL 按位取反
指令格式:CPL A ;把A的内容按位取反后再存储到A中。
例:
MOV A,#00000001B;A=00000001B
CPL A ;A=11111110B
ANL 按位取与
指令格式:ANL A ;把A的内容按位取与后再存储到A中。
例:
MOV A,#01000001B ; A=00000001B
ANL A,#01001111B ; A=01000001B
ORL 按位取或
指令格式:ORL A ;把A的内容按位取或后再存储到A中。
例:
MOV A,#00000001B ;A=00000001B
ORL A,#10001111B ;A=10001111B
XRL 按位取异或,相同为0,不同为1。
指令格式:XRL A ;把A的内容按位取异或后再存储到A中。
例:
MOV A,#00000001B;A=00000001B
XRL A,#00001111B ;A=00001110B
RL左移位指令
指令格式:RL A ;把A的内容按位左移后再存储到A中。
例:
MOV A,#00000001B;A=00000001B
RL A ;A=00000010B
RL A ;A=00000100B
RL A;A=00001000B
RR右移位指令
指令格式:RR A ;把A的内容按位右移后再存储到A中。
例:
MOV A,#00000001B ;A=10000000B
RR A ;A=01000000B
RR A ;A=00100000B
RR A ;A=00010000B
(4) 位操作指令
SETB 置1指令,只能对位操作,不可以对字节操作。
指令格式:SETB BIT ;对位BIT置1。
例:
SETB P1.0 ;P1.0=1
CLR 清零指令,可对位操作,也可对字节操作。
指令格式:CLR BIT ;对位BIT置0。
SETB C
MOV A,#11110000B
CLR C
CLR A
CPL 取反,可对位操作,也可对字节操作。
指令格式:CPL BIT ;对位BIT取反。
SETB C
MOV A,#11110000B
CPL C
CPL A
(5) 控制及转移指令
LJMP 长跳转指令
指令格式: LJMP 标号;程序将跳转到标号处执行。
LCALL长调用子程序指令,常与RET配合使用。
指令格式: LCALL 标号;调用为标号的子程序去执行。
RET子程序返回指令。
DJNZ 条件转移类指令(自减一指令)
指令格式: LOOP:DJNZ R7,LOOP
执行分两步:
(1) 将R7的内容减一后再送到R7中。
(2) 判断R7是不是等于0
如果是等于0,顺序执行下面的程序。
如果不等于0,跳转到标号为LOOP的地方去执行。
例:
MOV R7,#3;送循环次数。
CLR A;对A清零。
LOOP:INC A;对A加1。
DJNZ R7,LOOP;先让R7自减1,后判断是否等于0。
;不等于0跳转,等于零往下执行。
END
运行上面的程序后累加器A的值是多少?
答案:A=03H
学完了指令系统现在我们来实战一下,一个单片机最小系统的制作
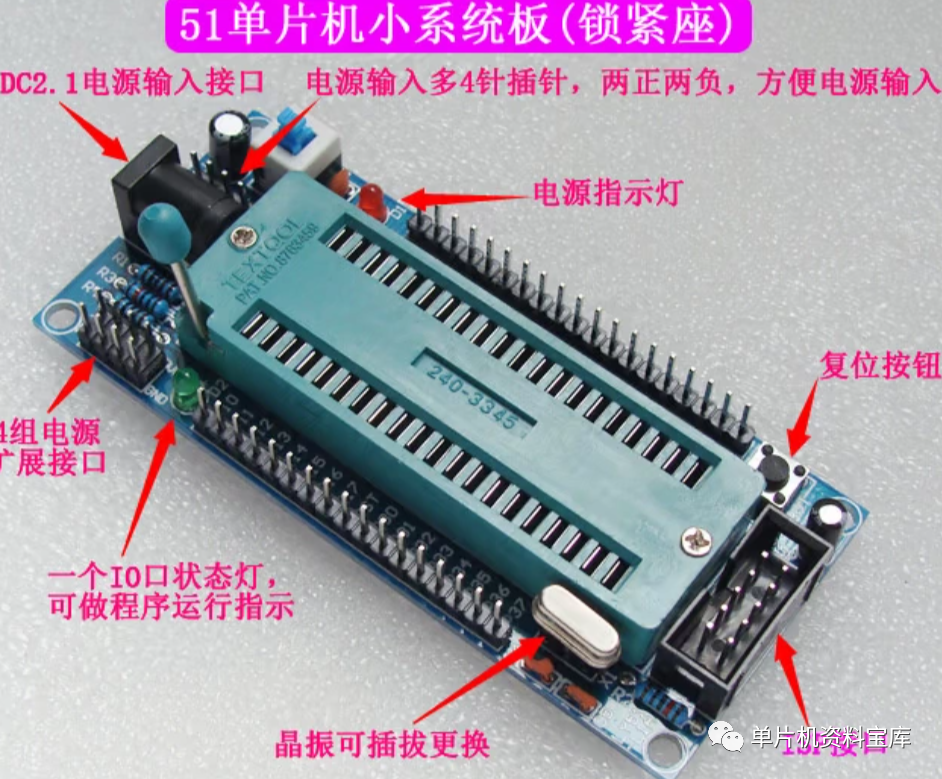
单片机最小系统制作
一、确定任务
开发单片机最小系统
二、任务分析:
该系统具有的功能:
(1)具有2位LED数码管显示功能。
(2)具有八路发光二极管显示各种流水灯。
(3)可以完成各种奏乐,报警等发声音类实验。
(4)具有复位功能。
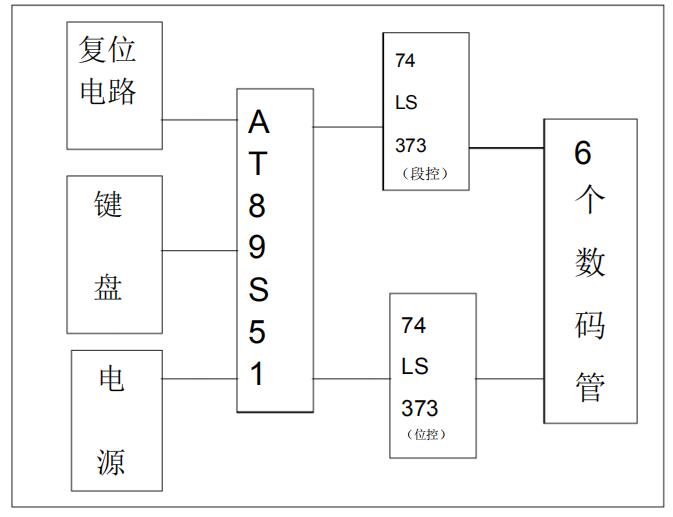
三、功能分析
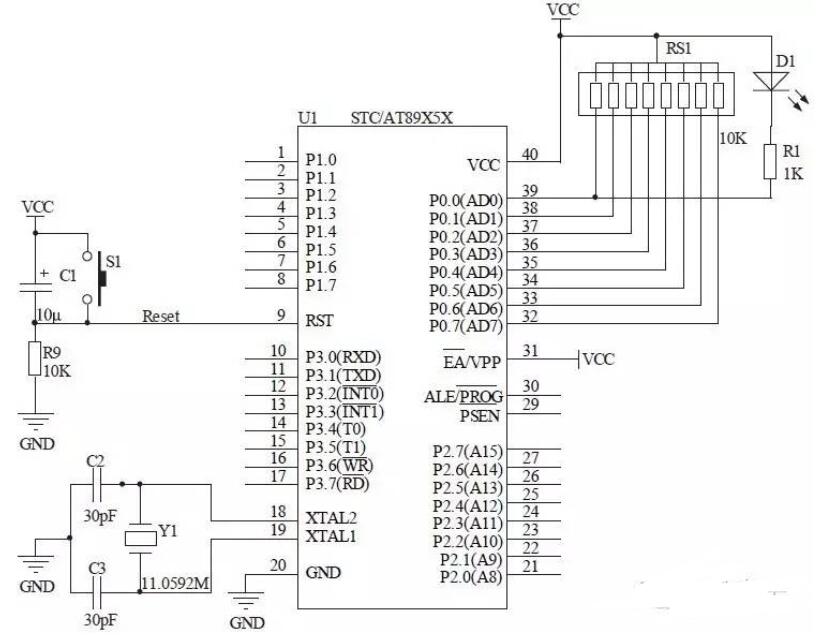
(1)两位LED数码管显示功能,我们可以利用单片机的P0口接两个数码管来现这个功能;
(2)八路发光二极管显示可以利用P1口接八个发光二极管实现这个功能;
(3)各种奏乐、报警等发声功能可以采用P2.0这个引脚接一蜂鸣器来实现。
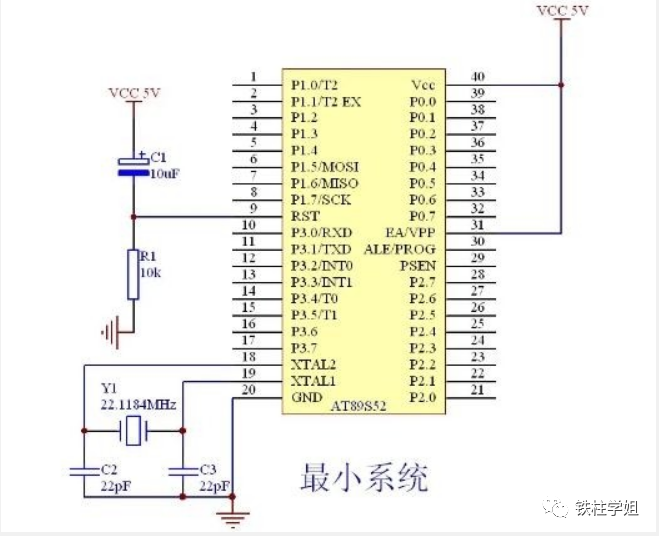
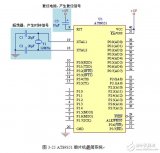
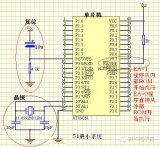
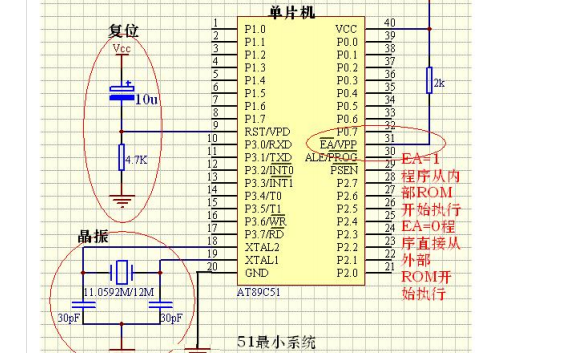
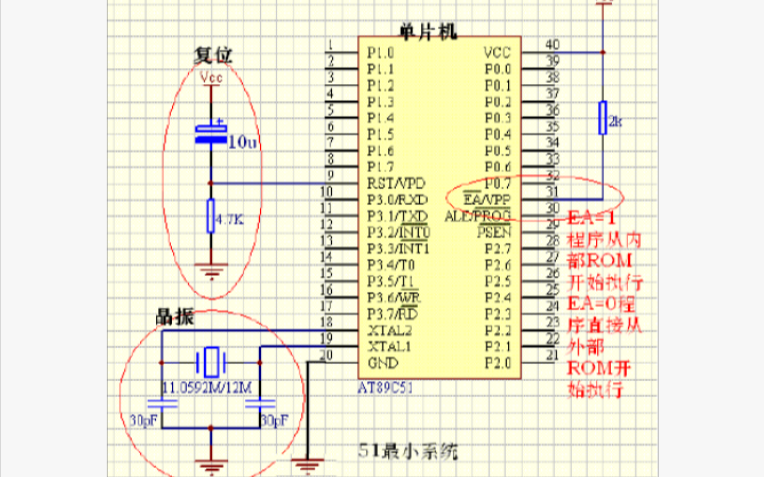
(4)利用单片机的第9脚可以设计成复位系统,我们采用按键复位;利用单片机的18、19脚可以设计成时钟电路,我们利用单片机的内部振荡方式设计的。
四、设计框图
根据本系统的功能,和单片机的工作条件,我们设计出下面的电路图。
六、元件清单的确定:
数码管:共阴极2只(分立)
电解电容:10UF的一只
30PF的电容2只
220欧的电阻9只
4.7K的电阻一只
1.2K的电阻一只
4.7K的排阻一只,
12MHZ的晶振一只
有源5V蜂名器一只
AT89S51单片机一片
常开按钮开关1只
紧锁座一只(方便芯取下来的,绿色的)
发光二极管(5MM红色)8只
万能板电路版15*17CM
S8550三极管一只
4.5V电池盒一只,导线若干。
七、硬件电路的焊接
按照原理图把上面的元件焊接好,详细步骤省略。
八、相关程序编写
针对上面的电路原理图,设计出本系统的详细功能:
(1)、第一个发光二极管点亮,同时数码管显示“1”。
(2)、第二个发光二极管点亮,同时数码管显示“2”。
(3)、依次类推到第八个发光二极管点亮,同时数码管显示“8”。
以上出现的是流水灯的效果
(4)、所有的发光二极管灭了,同时数码管现实“0”。
(5)、数码管显示“1”。
(6)、数码管显示“2、……”直到“9、A、B、C、D、E、F、Y”。
(7)、蜂鸣器发出九声报警声后重复上面所有步骤。
(8)程序如下:
ORG 0000H;伪指令,定义下面的程序代码(机器代码)从地址为0000H的单元存放。
LJMP START;跳转到标号为START的地方去执行。
ORG 0030H;伪指令,定义下面的程序代码(机器代码)从地址为0030H的单元存放。
START:MOV P1,#0FEH ;点亮第一个发光二极管。
CLR P2.7 ;送低电平到第一个数码管,开启数码管。
CLR P2.6 ;送低电平到第二个数码管,开启数码管。
MOV P0,#06H;让数码管显示“1” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0FDH;点亮第二个发光二极管。
MOV P0,#5bH;让数码管显示“2” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0FBH;点亮第三个发光二极管。
MOV P0,#4fH;让数码管显示“3” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0F7H;点亮第四个发光二极管。
MOV P0,#66H;让数码管显示“4” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0EFH;点亮第五个发光二极管。
MOV P0,#6dH;让数码管显示“5” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0DFH;点亮第六个发光二极管。
MOV P0,#7dH;让数码管显示“6” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0BFH;点亮第七个发光二极管。
MOV P0,#07H;让数码管显示“7” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#7FH;点亮第八个发光二极管。
MOV P0,#7fH;让数码管显示“8” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#00H;灭了所有的发光二极管。
MOV P0,#3FH;让数码管显示“0” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#06H;让数码管显示“1” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#5bH;让数码管显示“2” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#4fH;让数码管显示“3” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#66H;让数码管显示“4” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#6dH;让数码管显示“5” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7dH;让数码管显示“6” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#07H;让数码管显示“7” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7fH;让数码管显示“8” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#6fH;让数码管显示“9” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7fH;让数码管显示“A” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7fH;让数码管显示“b” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7fH;让数码管显示“C” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7fH;让数码管显示“d” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7fH;让数码管显示“E” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7fH;让数码管显示“F” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7fH;让数码管显示“Y” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV R4,#9;送蜂鸣器的报警次数。
LOOP:SETB P2.0;不发声
LCALL DELAY;调用延时子程序,起到延时的目的。
CLR P2.0;发声。
LCALL DELAY;调用延时子程序,起到延时的目的。
DJNZ R4,LOOP;发声九次后向下执行。
SETB P2.0;关闭发声
LJMP START;跳转到标号为START处执行,循环本程序。
DELAY:MOV R7,#200;这是延时子程序。
D1:MOV R6,#200
D2:MOV R5,#200
D3:DJNZ R5,D3
DJNZ R6,D2
DJNZ R7,D1
RET;延时子程序返回指令。
END;结束伪指令。
九、利用KEIL C51 软件对上面的程序进行调试和编译,产生*.HEX文件,以便用编程器写入单片机芯片中。
十、编程器的使用:用编程器把电脑里生成的*.HEX文件写到芯片中。
-
存储器
+关注
关注
38文章
7485浏览量
163794 -
51单片机
+关注
关注
274文章
5702浏览量
123537 -
指令系统
+关注
关注
1文章
81浏览量
15646
发布评论请先 登录
相关推荐
单片机最小系统






 工商网监
工商网监
评论