 电动滑板的制作教程
电动滑板的制作教程
第1步:材料和工具
这个项目需要焊接技能,成本约为€ 500。
材料:
供应商的所有材料和链接都在物料清单表中。
工具:
烙铁+锡
钳子
热胶枪
螺丝刀和艾伦键套件
pincet有时会派上用场
剪线钳/剥线器
本项目使用车床,激光切割机和3D打印机!
步骤2:更换车轮和准备卡车
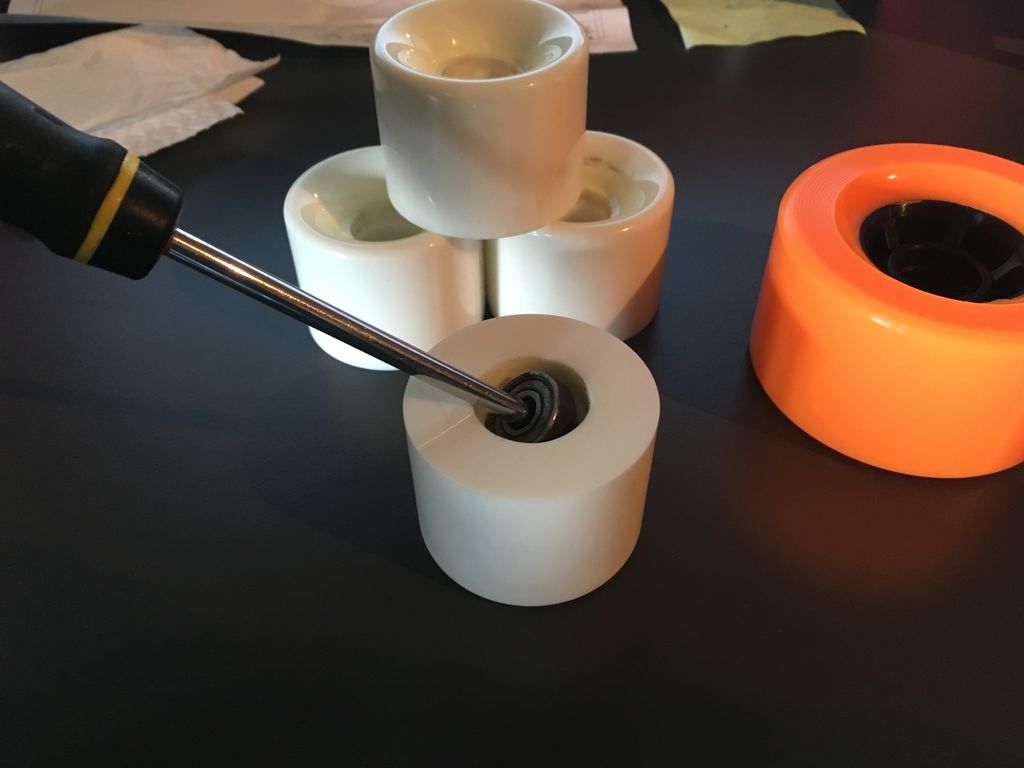



首先,我从长板上取下那些小白色轮子。然后我拆下滚珠轴承并将它们放入橙色90毫米轮子中。
安装电机的卡车需要进行小幅调整。带齿轮的车轮不适合我买的长板卡车,因此我不得不用车床切割约1厘米。
然后将它们安装在卡车上,除了车轮外齿轮(我随机选择右侧,背面)。
步骤3:切割和焊接电机座





我使用激光切割机制作了铝制电机支架,尺寸如上图所示。
定位山的重要性。它需要尽可能地向下倾斜而不接触电路板,因为我有一个大电机,角度不是那么大。我碰巧认识一个焊工,所以起初他把它焊接了一下,然后测试定位,我把卡车从一边推到另一边,看看它是否碰到了电路板。
我的整个电路板都是完成后,我做了一次测试,电机安装座断开,这就解释了为什么我的电机在即将拍摄的照片中看起来会受损;)之后我让我的熟人完全焊接它。
步骤4:安装电机和皮带





使用4个M4 * 14粗体将电机安装到底座上。
之后,您必须将12齿电机皮带轮固定在电机轴上。确保轴上的扁平部分有细长的粗体!
现在你可以带上一条皮带并将它放在滑轮上,带齿轮转动轮子并将其转动,直到整个皮带绕在齿轮上。
将螺母拧紧到叉车上,这样你的车轮就不会脱落,就是这样。
步骤5:接线图

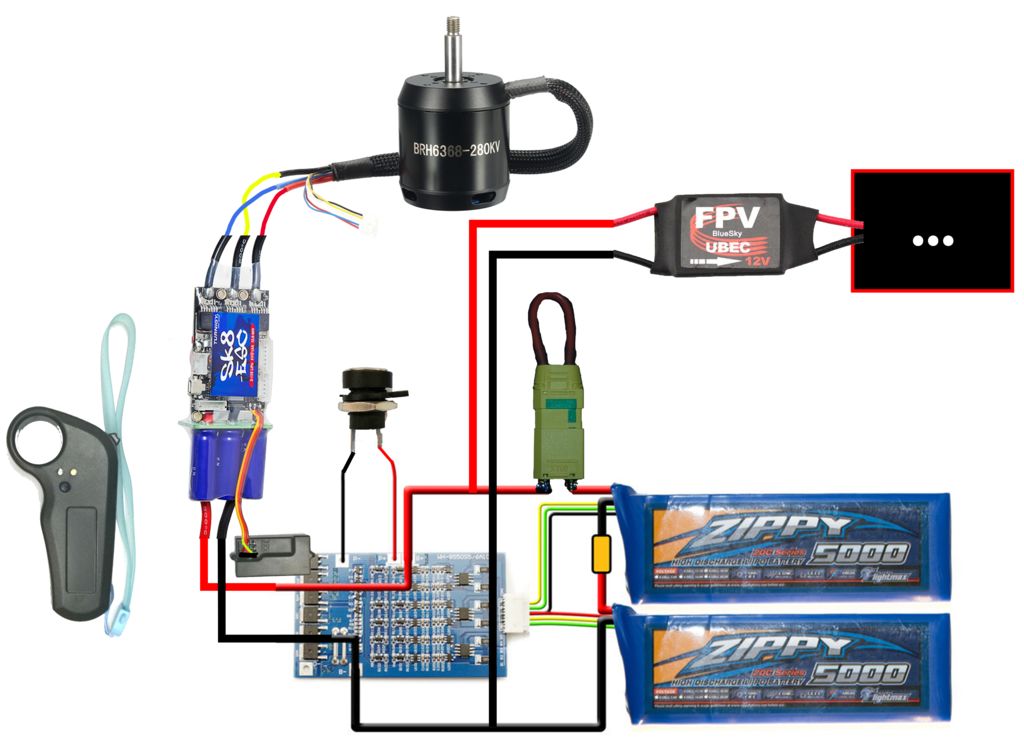


根据上图连接电子元件。
第一个是te电子的完整原理图。
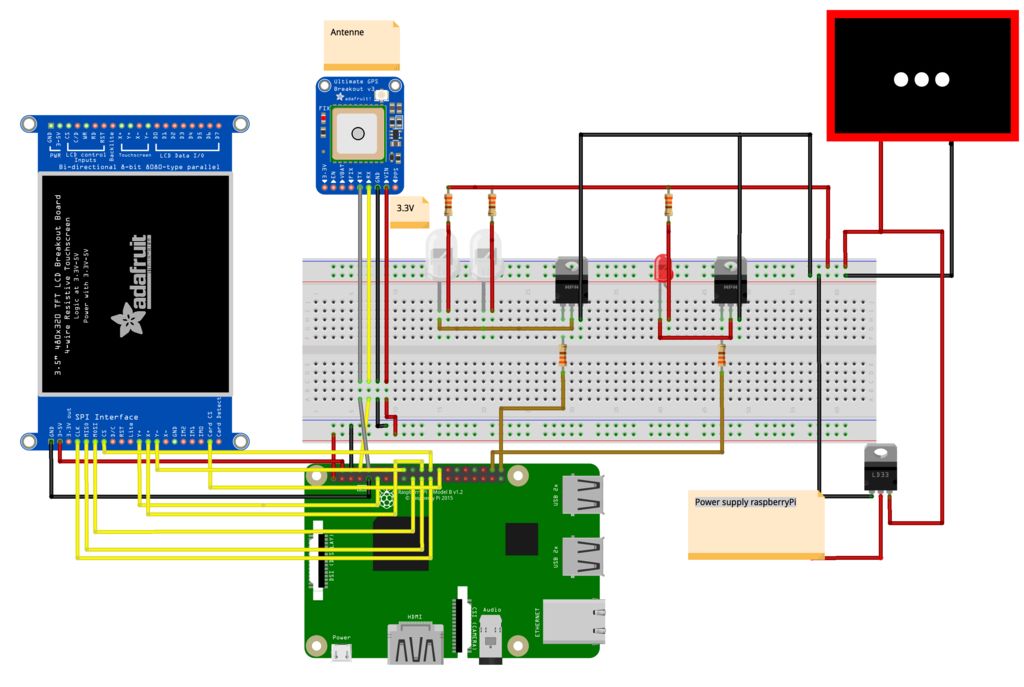
第二张图显示了电动长板部分的所有连接,6s UBEC到12V则进入下图。该图显示了由覆盆子Pi控制的灯和传感器的电路。
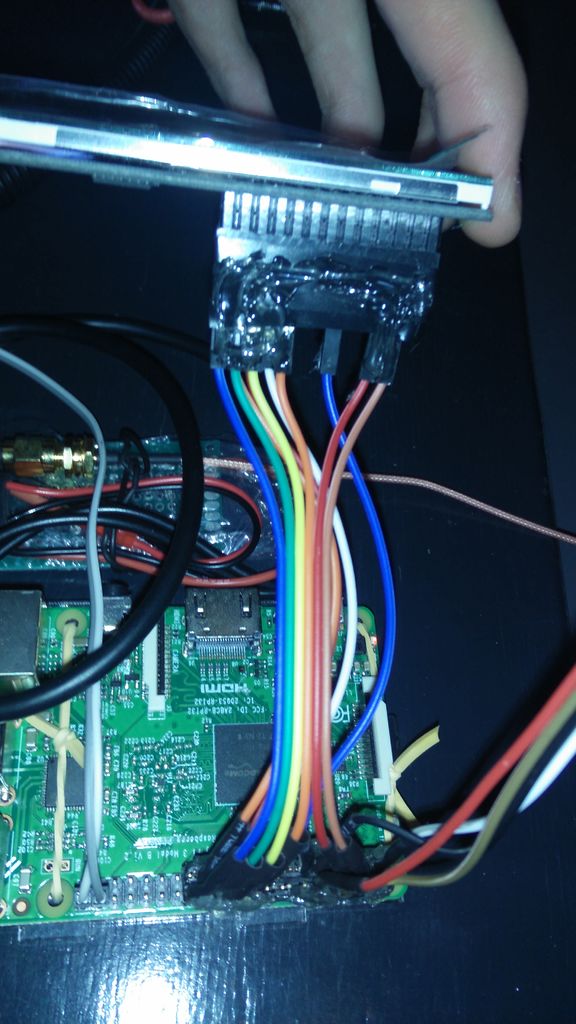
正如您可能已经看到的那样,tft屏幕有一个带有许多针脚的母头。我们需要与GPS模块进行串行通信的引脚。所以我把我们需要的引线(图4-6)上的电线焊接到插入Pi的母头。
步骤6:连接BMS









我使用comsa42作为连接图的可用构件。
我使用BMS(电池管理系统)平衡板给我的脂肪充电,这样我就可以将它们留给我了通过防水直流插孔为“智能充电器”充电并给它们充电
我焊接了BMS充电端口的两根电缆,一根在P-(黑色)上,另一根在P +上(红色)。(这些电缆不需要太厚,因为通过充电端口只需要2安培)
注意:一开始我使用的是DC插孔用螺丝钉,但我后来用BOM中的防水DC插孔替换它。不要焊接插头,或者一旦你想把它放在你的外壳中你就会遇到问题。
我将两个电池与一个‘XT60 2包串联插头’连接起来买的。我将那个公头插入一个母头,然后我用一条粗红色和黑色的线焊接到它。红线进入B +和BMS,黑线进入B-。
然后是电池的平衡电缆。我使用了两条购买的平衡电缆,并将红色平衡线拔出,用于电池一,最后一根黑线用于两侧电池2。我们不需要那些,因为它们与我们已经连接的厚电池线相同。然后按照正确的顺序焊接它,如图所示。
注意:在中间我用下一个电池的正极接地,但这不是必需的,因为系列连接器已经这样做了。
步骤7:开/关开关(循环键)

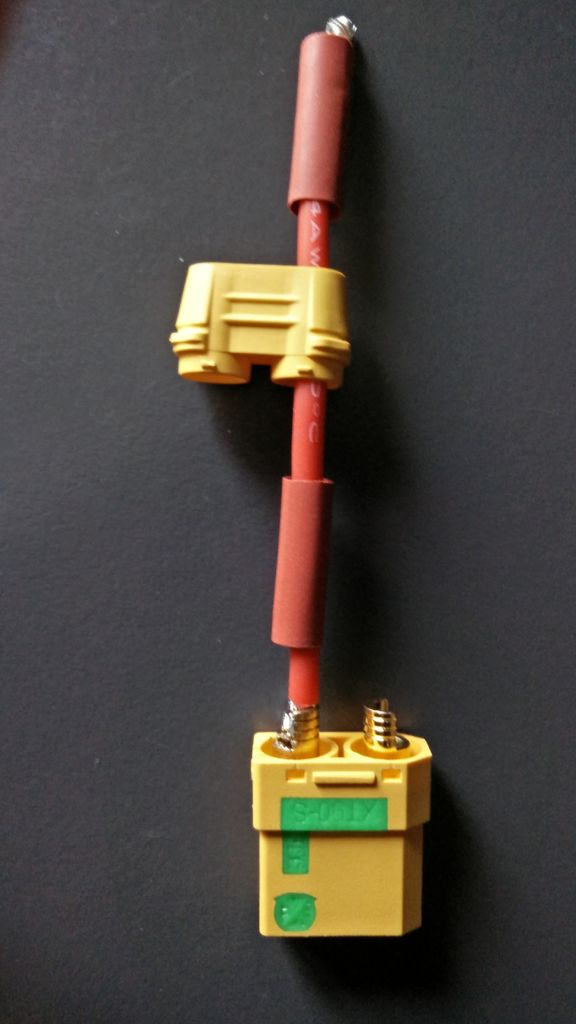




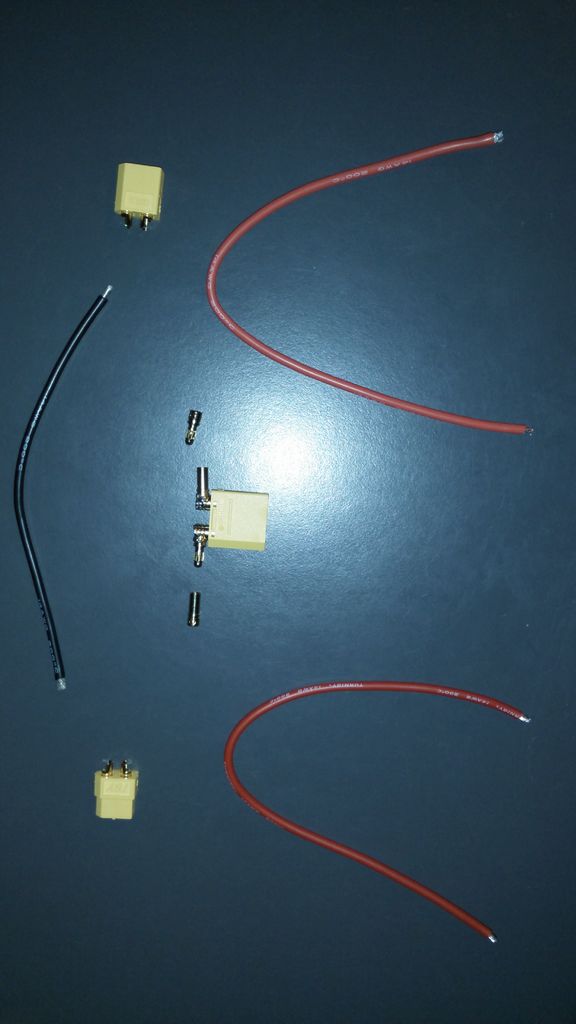
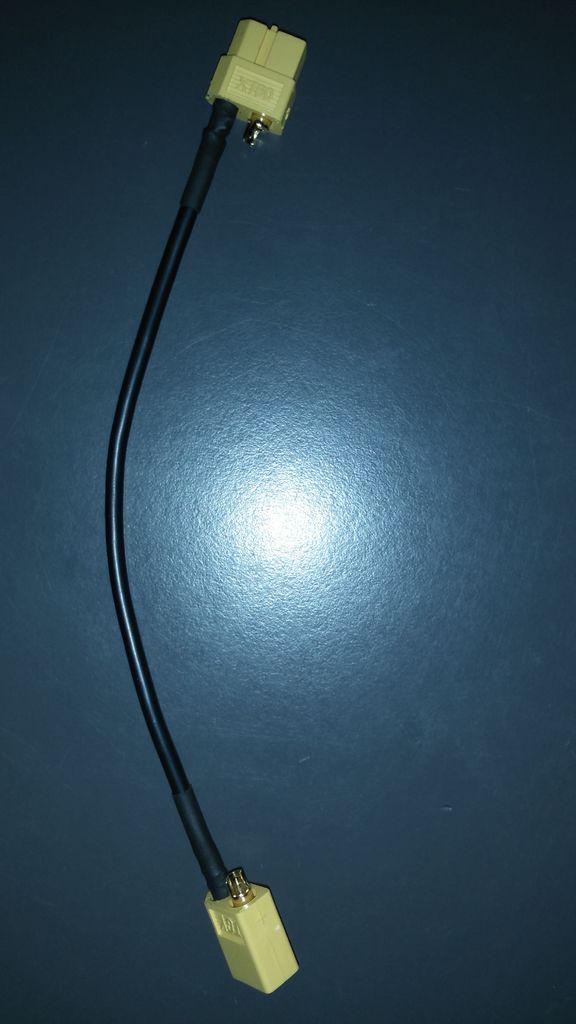




我没有购买60美元的反火花开关,而是制作了一个循环键。原理很简单。你在电路中断并打开电路板,插上XT90防火花连接器,电路关闭,没有任何火花。
首先我把电线焊到公插头上(图片) 2-4)然后将一些3.5mm子弹连接器连接到母XT90插头。
为了将它连接到电池,我使用公XT60连接器连接到母XT60连接器,但红线中断。然后我将子弹连接器焊接到我将电线切成两半的末端,这样我就可以插入母XT90接头而不是将其直接焊接到电缆上。所以插上电源,开/关开关就完成了。
步骤8:VESC,电池指示灯和UBEC Connecor

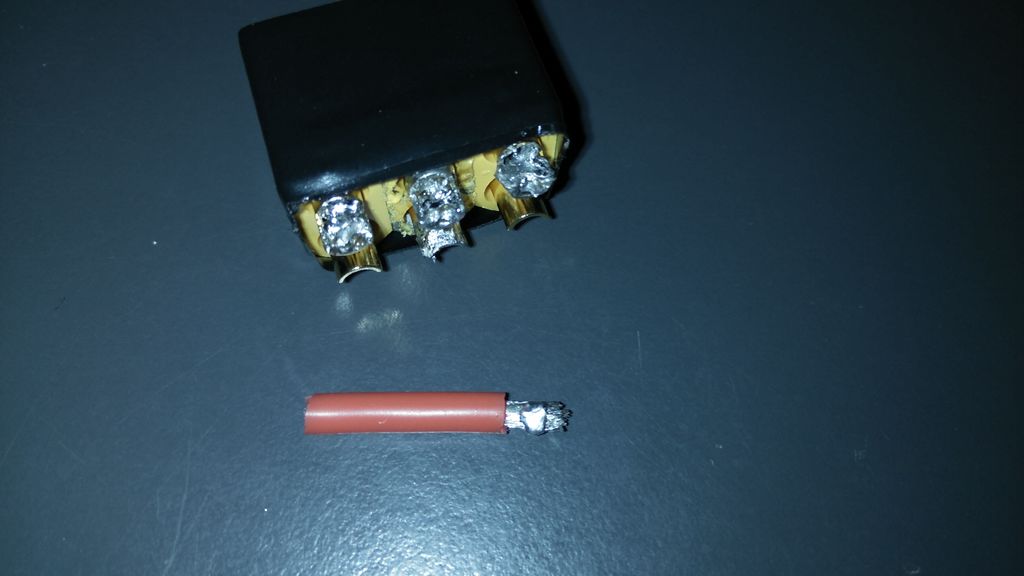












我将自己的‘3并联到1个连接器通过将3个XT60接头连接在一起(图1)并将电线焊接到树形正极和电线连接到树形负极(图2-6)。接下来,我将一个公连接器焊接到它上面并用一些黑色胶带保护裸电缆。 (图7-9)
VESC和指示灯
将公XT60插头焊接到VESC电源线和电池百分比/电压电缆上指示灯。
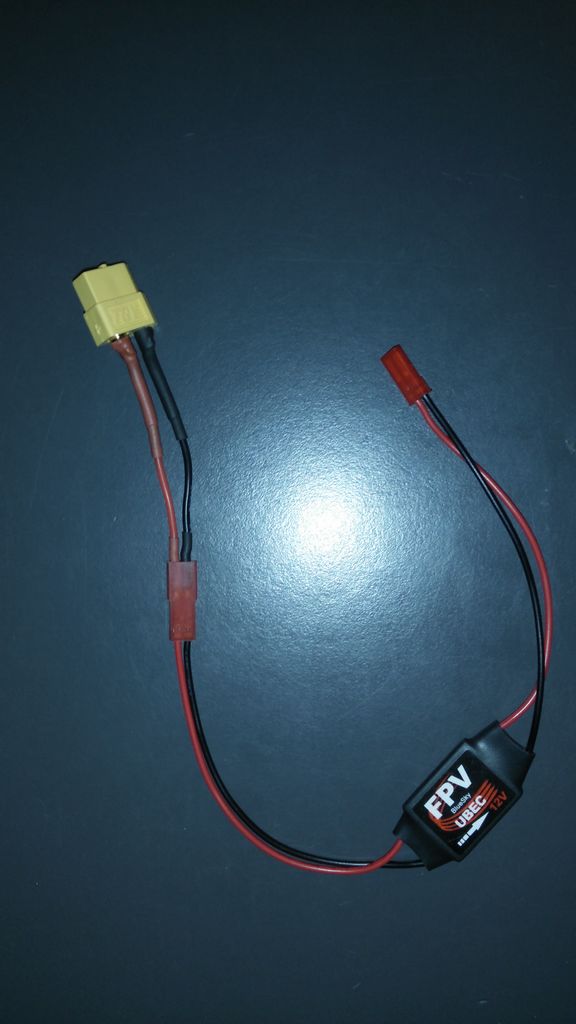
uBEC
将公端的 2平衡电缆和焊锡拔出至公XT60插头。母端连接到uBEC(电压转换器)的输入侧。
注意:我把平衡线切成了一点’,但这是一个错误所以保持完整;)
步骤9:电机传感器到Vesc




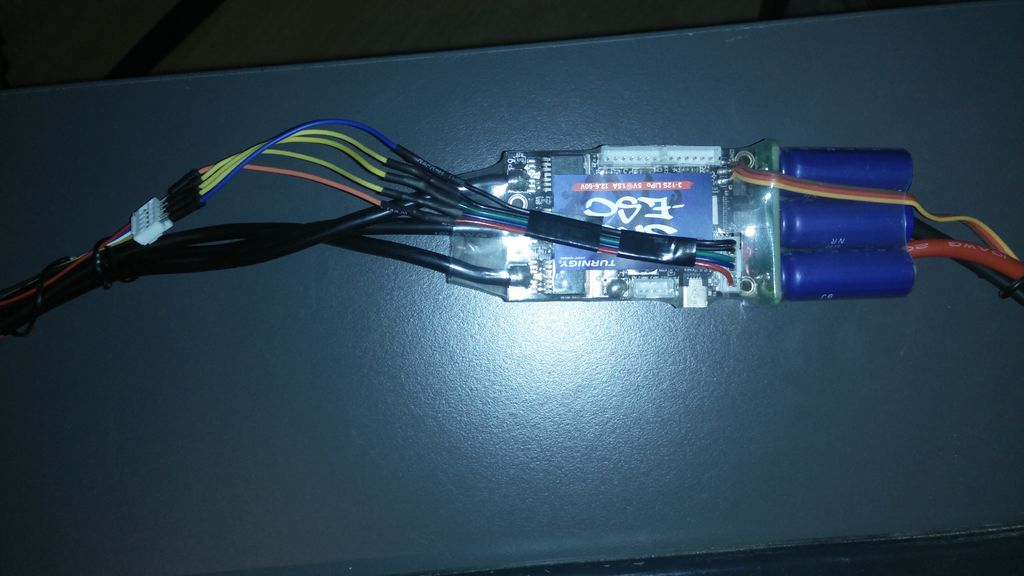
使用两根步进电缆将电机传感器连接到VESC。电机有5个引脚,2个用于霍尔传感器的电源(每个霍尔传感器1个引脚)。
从4pin侧拉出4根电缆,从第2根步进电缆中取出额外的电线,将它们剪短一点并将一些公针固定到末端。按照图片中的正确顺序放置它们
使用热缩管和胶带使一切安全!完成后,剩下要做的就是从VESC到电机正确的顺序。
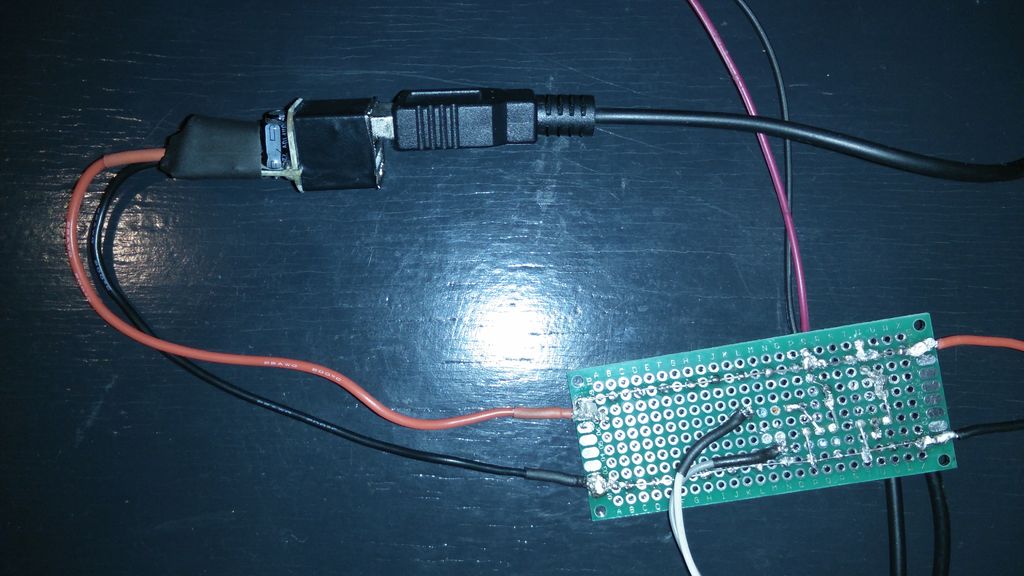
步骤10:电源Raspberry Pi










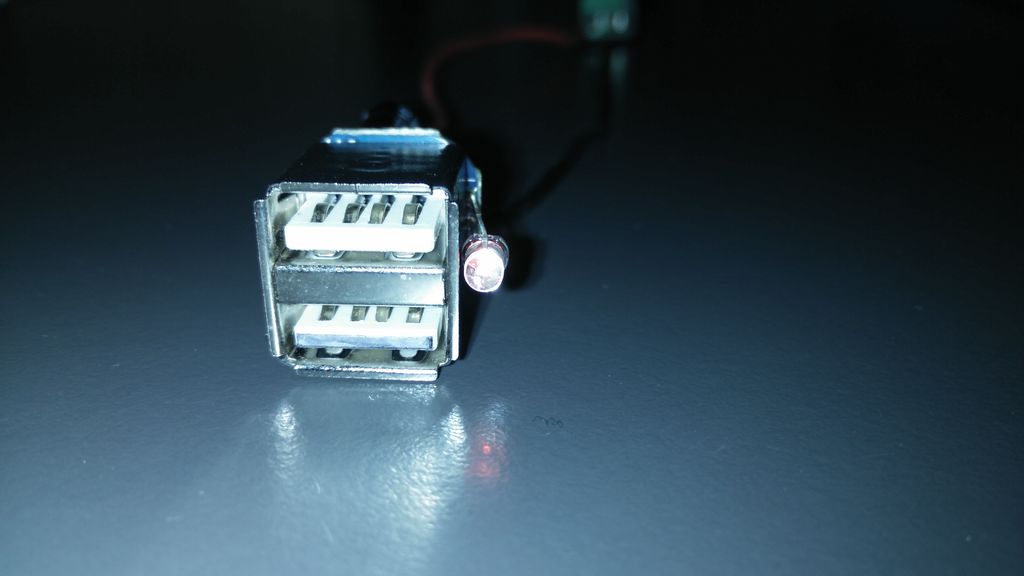
我们需要一个12V到5V的转换器这将通过USB为树莓派提供动力,所以我立即想到了一个车载充电器。这是一个廉价而实用的解决方案。
注意:在我们打开它之前,你应该确保你记得哪一个是可以提供2.1安培的端口,因为Pi需要
所以取下贴纸并拧下汽车顶部的电荷,然后松开底部的插针。之后它将很容易打开,焊接弹簧(+ 12V)和金属弯曲物体(GND)松动,并用其中2根平衡线替换它们(将公侧焊接到PCB)。
完成后,我检查一切是否正确,将一个直流插孔连接到电线上,然后将其插入我的LED规定的电源并测量USB输出电压(两个外部电压为+ 5V和GND)。
如果一切正常,你可以用一些热缩管和胶带隐藏裸露的金属部件。
注意: Dubbelcheck充电器上的极性,因为它可能不同。
步骤11:连接Pi,灯和GPS













现在是灯的电源。
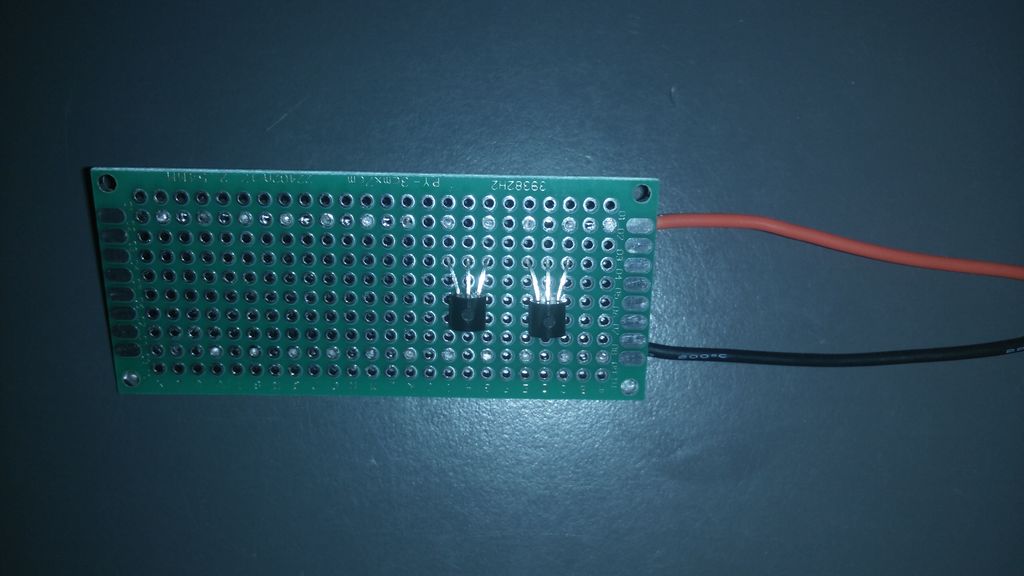
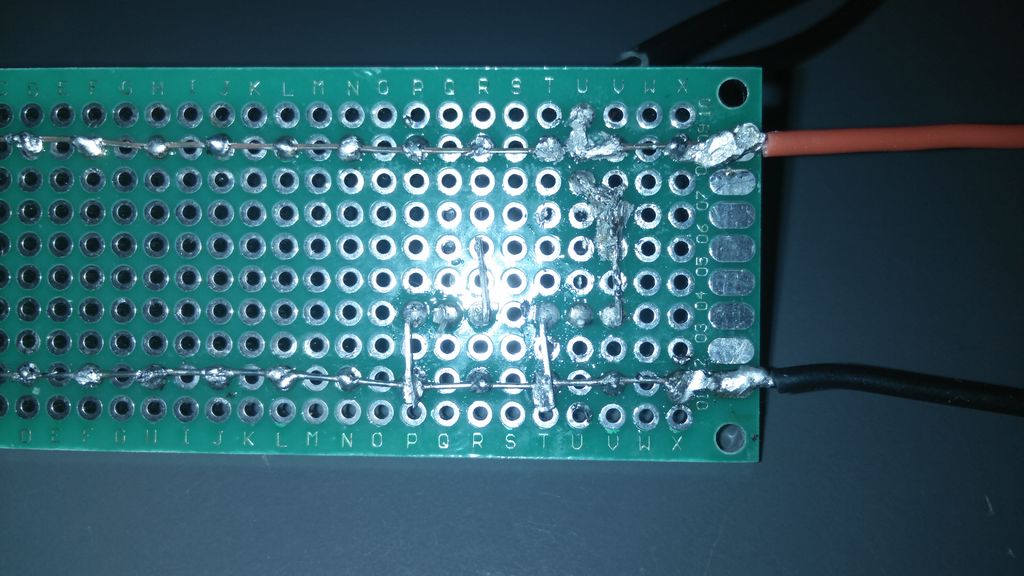
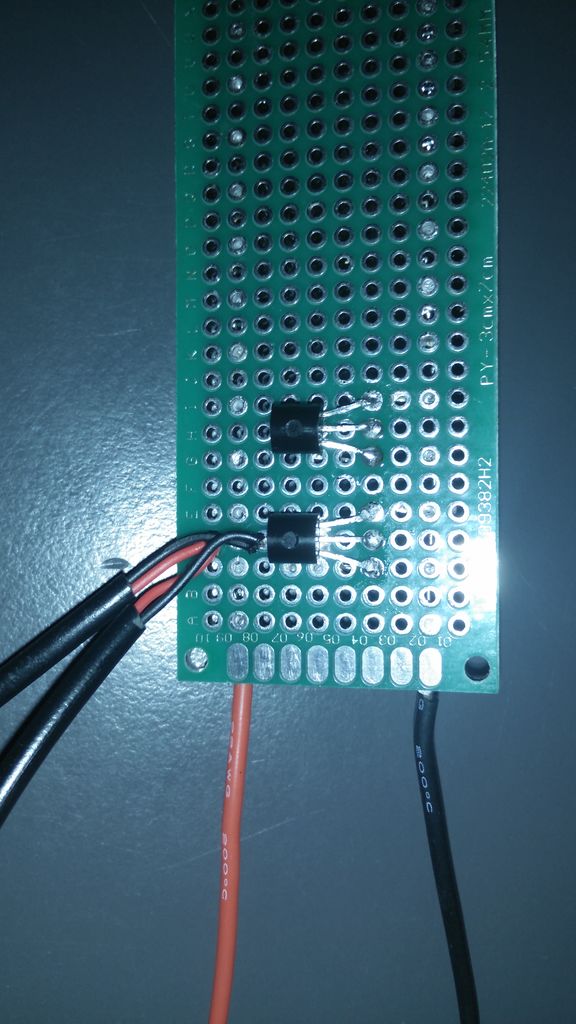
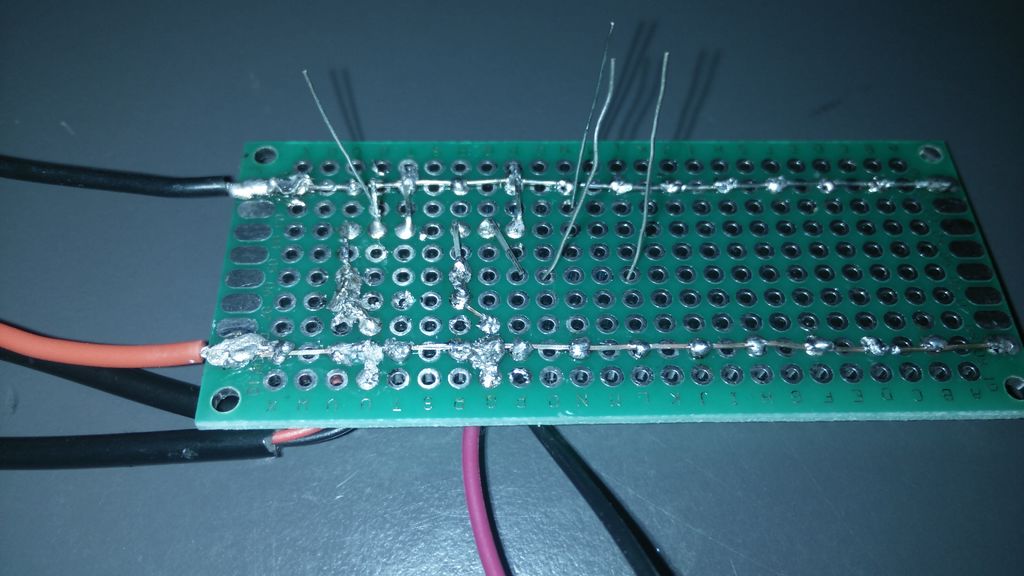
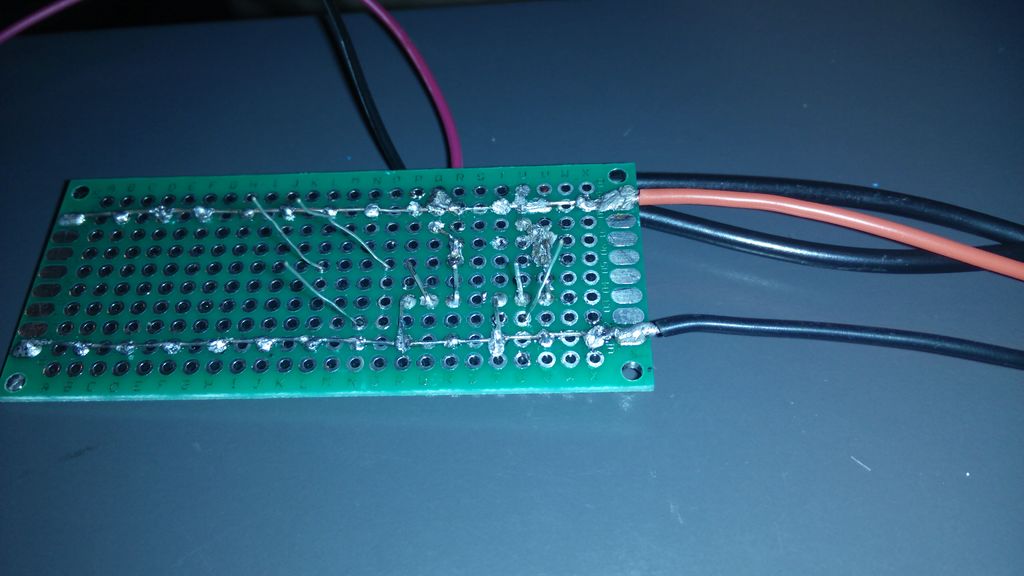
我们从uBEC收到12V电源,我们需要前灯,尾灯和车载充电器。树莓派不能提供足够的电流和电压来供给LED,因此我们将不得不使用晶体管。 12V将用作电源,树莓pi将通过控制NPN晶体管的基极(2N222:pic 2)来打开和关闭它们,所以让它将其焊接到原型板上。
首先关闭所有的尾灯都是长板的背面,树莓派将从前面进入,因此必须延长电缆(图3-5)。尾灯有3根电线。黑色(负),黄色(运行/尾灯),红色(制动/停止灯)。但是因为制动灯和行车灯之间只有很小的差别,所以我选择使用红线并单独使用黄色线。将长的阳线放在后灯的金属中并将其弯曲在一起,直到电线不再松动。对黑色和红色线进行此操作。
对于尾灯,请将它们平行焊接。然后是原型板。将两根平衡线的母端焊接到电路板上,使用铜线在整个电路板上铺设12V。然后添加晶体管,一个用于前灯,一个用于后灯。集电极 - 》 12V,发射极 - 》 GND到电阻的基极,然后是带有母端的导线,它将安装在树莓派GPIO引脚(引脚20和21)上。车载充电器可以通过12V供电,然后将USB线连接到正确的USB输入端,并将微型USB端放入树莓派中。
连接GPS:
PI GPS
3.3V - 》 Vin
GND - 》 GND
RX - 》 TX
TX - 》 RX
注意:只有晶体管的2个基极引脚需要外部电阻来限制电流。灯不需要那些,因为它们内置于LED中。
第12步:住房
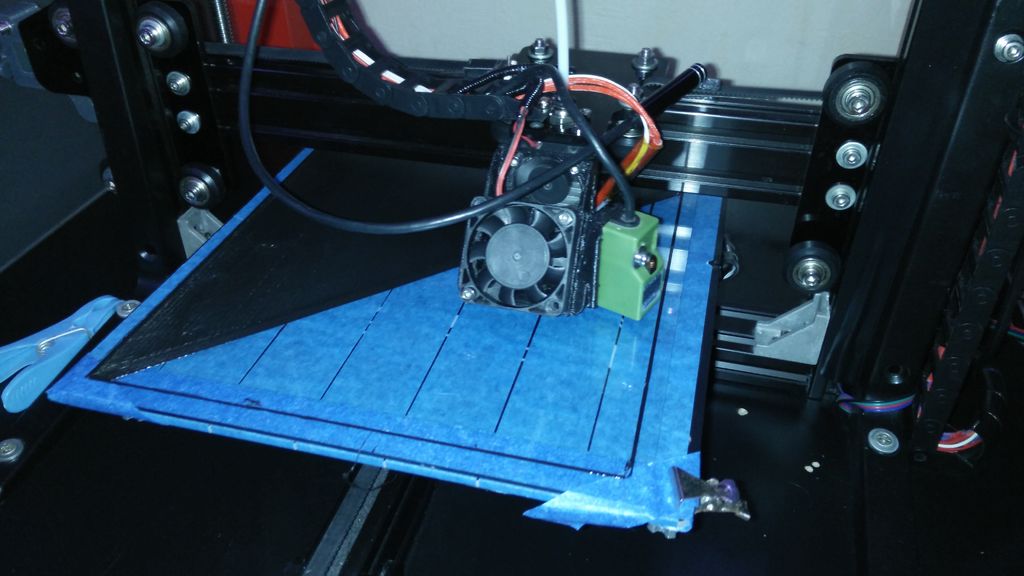












我将塑料薄膜中的零件包裹在一起,以确保所有钢丝都牢固,然后更容易将我放入外壳中。我设计了发明家的所有部件,并用我的3D打印机打印出来。提供了所有发明人(.ipt)文件和打印机/切片器文件(.stl)。设计非常基础。
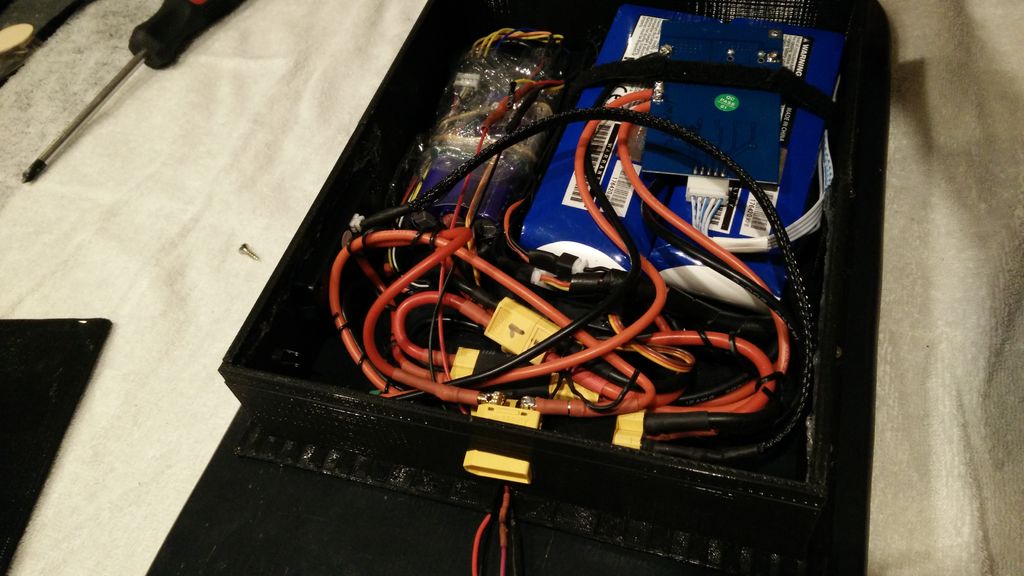
背面(电动长板部件)
您可以将电池指示器插入和母XT90插头然后放置塑料盒子。一旦外壳卡住,我用热胶固定XT90插头,以便在开关被拉入和拉出时它会卡住。我还在安装XT90插头的墙壁旁边的外壳内侧添加了一个螺丝,这样当插入环形键时墙壁就无法压入。
gps模块的天线很长很长。所以我将两端保持在盒子外面并将电线折叠到盒子的这一部分。
注意:使用不长的螺丝,然后长板厚!
一旦好了,我用防水插座替换了我的测试DC插孔。我将带有母子弹连接器的电线焊接到连接到BMS板的电线上的电线和公子弹连接器上。再一次,电线不必太厚,因为充电器只能提供大约2安培的电流。使用一些较小的电线将插座插入外壳也更容易。..。..
正面(带有GPS和灯光的覆盆子)
将屏幕滑入机箱背面。将电缆放入外壳内并拧紧。你也可能想在天线和覆盆子Pi之间加一些金属箔,因为它非常有磁性,计算机并不总是这样。
注意:小心当您将Tft屏幕滑入外壳时,您不会损坏任何控制触摸的电缆。它发生在我身上。..。..
步骤13:基本设置Pi
首先,我们需要一张带Raspbian的SD卡。你可以从这里下载raspbian。一旦下载,我们就可以在SD卡上安装raspbian。您可以在计算机上使用Win32Discmanager或etcher安装软件。
安装完成后,您必须添加一个名为‘ssh’的文件,无需扩展以启用SSH上的SSH 。完成后,您可以启动覆盆子并将其添加到您的网络中。
pi将无法连接到您的网络,因此您必须设置APIPA地址,这是IP地址, pi将在没有连接到网络时拥有。打开SD卡上的文件‘cmdline.txt’并添加APIPI地址。例如:‘ip = 169.254.10.5’。
注意:确保所有内容都在一行上或不起作用!
将SD放入PI,添加一条网线pi到您的计算机然后插上电源。
之后您可以使用Putty或者如果您使用mac,只需使用终端创建SSH连接。
ssh pi@169.254.10.5
添加无线连接:
要向您的pi添加新网络,您可以输入以下命令:
echo ENTER_ YOUR_PASSWORD | wpa_passphrase ENTER_YOUR_SSID 》》
/etc/wpa_supplicant/wpa_supplicant.conf
重新启动后,您应该能够找到路由器上的IP地址,并通过带有该IP地址的ssh连接到你的pi。
ssh pi@IP_FROM_PI
总是找到你的ip有点烦人所以让我们设置一个主机名,这样我们就可以使用它了(在windown PC上需要安装bonjour for this)。
sudo raspi-config nonint do_hostname CHOOSE_A_HOSTNAME
注意:要在将来使用主机名,你应该输入如下的SSH规则:
ssh USER@YOUR_HOSTNAME.local
我们应该确保pi的系统和软件包是最新的:
输入以下命令来实现:
sudo apt-get update && sudo apt-get upgrade
步骤14:将项目放在你的Pi
新用户
我为这个项目创建了一个新用户‘longboard’:
我们需要转到root
》 sudo -i
》 Adduser longboard
New password: 》 l0ngb0@rd
Full name: 》 electric longboard
你可以把剩下的留空。接下来我们需要给用户“longboard”sudo的权利
》 adduser longboard sudo
之后我们将回到我们的退潮用户
》 su longboard
软件包
为项目安装一些软件包。用于托管网站数据库的软件包
》 python3 -m pip install --user --upgrade pip==9.0.3
》 sudo apt install -y python3-mysqldb mysql-server uwsgi nginx uwsgi-plugin-python3 rabbitmq-server
连接器数据库,软件包网站库和GPS/tijdzone detectie
》 python -m pip install mysql-connector-python argon2-cffi Flask Flask-HTTPAuth Flask-MySQL mysql-connector-python passlib argon2 libgeos-dev pytz tzwhere
数据库设置
检查mysql的状态
》 sudo systemctl status mysql
通过输入此命令,您可以看到MySQL只侦听127.0.0.1 - 》无法从网络访问,只在本地(在自己身上)。
》 ss -lt | grep mysql
以客户端身份启动客户端
》 sudo mysql
创建用户:
》 CREATE USER ‘project-admin’@‘localhost’ IDENTIFIED BY ‘@min_l0ngb0@rd’;
》 CREATE USER ‘project-longboard’@‘localhost’ IDENTIFIED BY ’l0ngb0@rd’;
创建数据库和设置权限:
》 CREATE DATABASE longboard_db;
》 GRANT ALL PRIVILEGES ON longboard_db.* to ‘project-admin’@‘localhost’ WITH GRANT OPTION;
》 GRANT SELECT, INSERT, UPDATE, DELETE ON longboard_db.* TO ‘project-longboard’@‘localhost’;
》 FLUSH PRIVILEGES;
运行sql脚本创建表,它还将为网站创建默认用户:
(用户名: longboard,密码:test):
》 source \home\logboard\longboard\longboard_db.sql;
》 exit
测试运行文件是否有效:
》 echo ‘show tables;’ | mysql longboard_db -t -u project-admin -p
创建一个目录‘longboard’并从github克隆我的项目
》 mkdir longboard && cd longboard
》 git clone https://github.com/ThomasVantricht/electricLongboard.git
如果您使用了与我相同的目录名和用户,则不应调整conf目录中的文件。
如果您不是应该调整文件(》 sudo nano conf/filename.extension)
一旦路径正确,您必须将文件复制到系统目录。有树服务。
一个用于localhost上的kiosk站点。
一个用于带数据库连接的gps模块
一个用于网络上可用的站点
》 sudo cp conf/project1-*.service /etc/systemd/system/
》 sudo systemctl daemon-reload
》 sudo systemctl start project1-*
》 sudo systemctl status project1-*
当一切正常时,你应该启用它们,以便它们在pi启动时自动启动:
(如果上一步失败,那么你应该检查配置文件中的路径)
》 sudo systemctl enable project1-*
配置nginx服务:
将conf/nginx复制到‘sites-available’(并给它一个更好的名字)
删除default-config的链接
链接到新配置/nginx
重启以激活更改
》 sudo cp conf/nginx /etc/nginx/sites-available/project1
》 sudo rm /etc/nginx/sites-enabled/default
》 sudo ln -s /etc/nginx/sites-available/project1 /etc/nginx/sites-enabled/project1
》 sudo systemctl restart nginx.service
检查nginx是否存活:
》 sudo systemctl status nginx.service
完成后,您的网络上可以使用网络服务器上的网络服务器和本地主机上的网站启动和停止会话离线。
步骤15:设置Kiosk模式Raspberry Pi

安装软件包
》 sudo apt-get install chromium-browser x11-xserver-utils unclutter
输入pi的自动启动文件user:
》 sudo nano /etc/xdg/lxsession/LXDE-pi/autostart
你必须注释掉(把#放在t前面他行)现有规则:
#@xscreensaver -no-splash
接下来在屏幕保护线下添加这些行
@xset s off
@xset -dpms
@xset s noblank
@chromium-browser --noerrdialogs --kiosk http://127.0.0.1:8080/ --overscroll-history-navigation=0 --incognito --disable-pinch
点击ctrl-O然后按ctrl-X写退出并退出文件,然后输入:
》 sudo raspi-config
从那里向下导航到boot_behaviour并将此设置更改为以桌面模式启动,默认情况下以用户pi身份登录。
注意:退出自助服务终端模式,您可以输入
》 sudo killall chromium-browser.
这将关闭所有铬浏览器实例。
第16步:工作原理











当pi启动时,您将看到IP地址在tft屏幕上以及所有用户的列表。
您可以通过此屏幕离线启动会话。你也可以控制你的灯。如果您在浏览器中键入IP地址,您将进入登录屏幕。您可以使用默认用户‘board’登录(密码:test)。或者您可以创建一个新帐户。完成后,您将看到您的仪表板。在这里,您可以看到您的旅行路线和总距离,旅行时间。如果你进入长板标签,你可以看到电路板的当前位置,你可以切换你的灯,你可以开始录制会话。点击“开始会话”后,PI会不断确定位置并将其保存在数据库中,直到您按下“停止会话”。如果GPS没有修复,则无法启动会话,您将在屏幕顶部收到警报。您的会话将显示在Google地图上。
-
电动滑板
+关注
关注
0文章
20浏览量
6895
发布评论请先 登录
相关推荐
朗凯威锂电池定制飞鸽电动滑板车48V磷酸铁锂电池组

博世与宁德时代携手深化滑板底盘合作
光刻掩膜版制作流程
解析电动车充电架构与安全保护解决方案
电动汽车用电动机的种类及控制方法
电动车电动机的构成部件
时速高达25公里/小时的电动滑板车,在德国允许吗?(ABE)

德国电动滑板车及电动助力自行车eKFV法规-ABE认证的解决方案
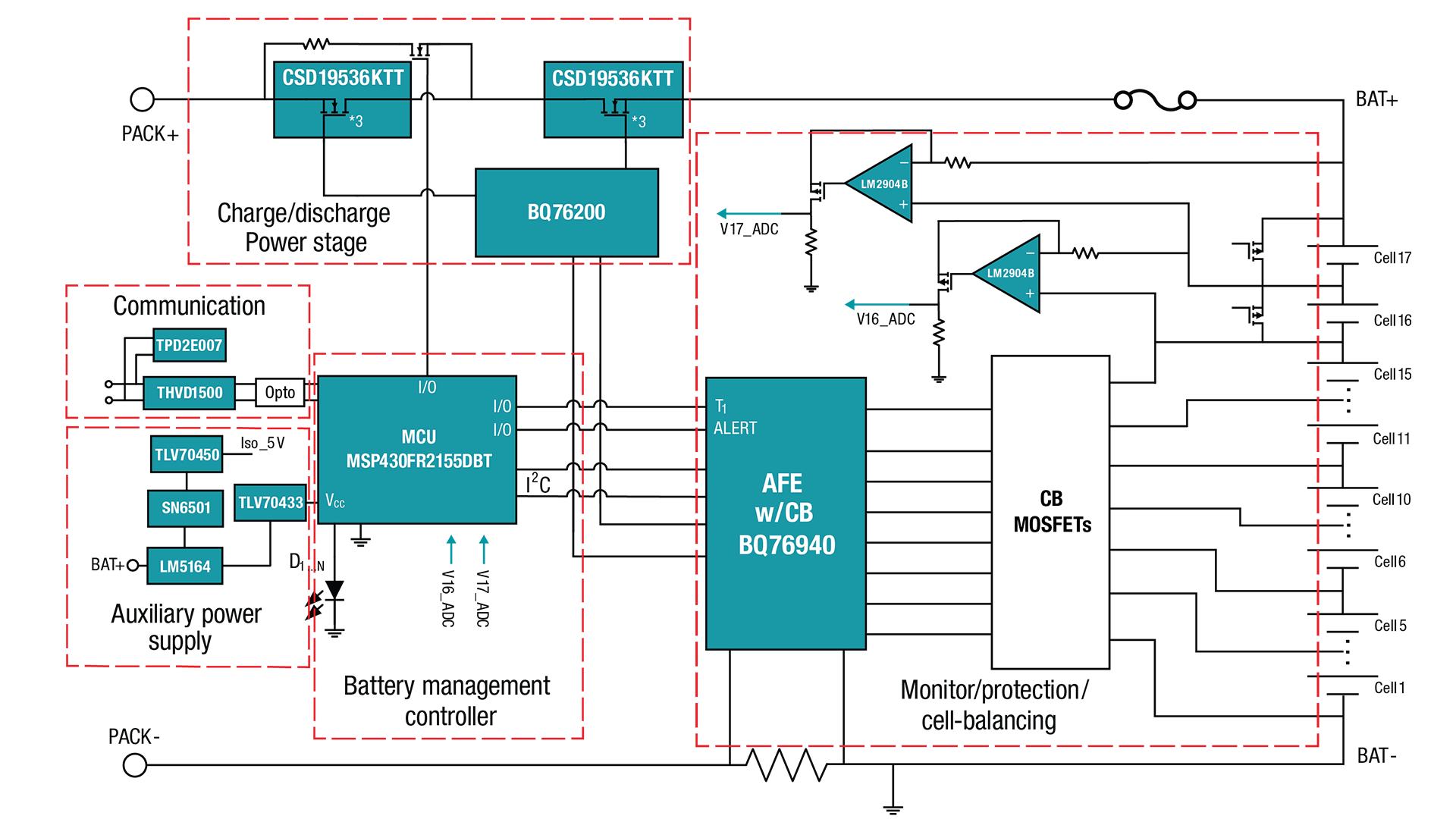
速度与激情:为电动摩托车设计寿命更长的 16S-17S 锂离子电池组
TÜV莱茵与坦途创新举行电动滑板车合作实验室授牌仪式






 工商网监
工商网监
评论