 老鼠机器人的制作教程
老鼠机器人的制作教程
第1步:你需要什么:
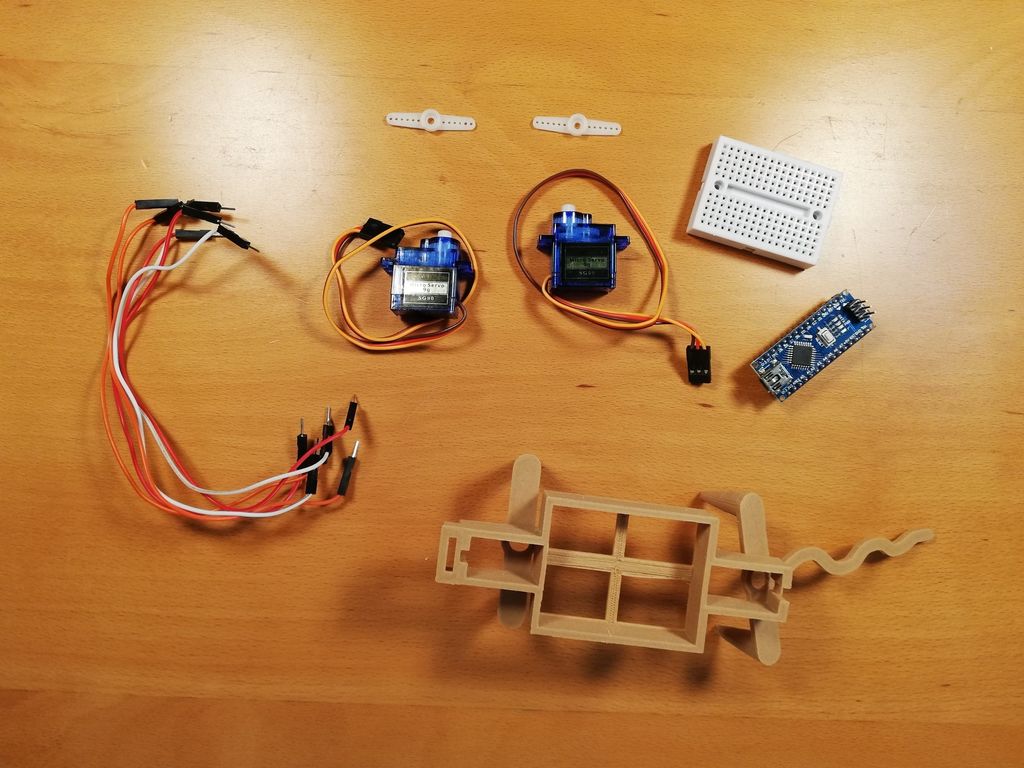
- 2台SG90伺服电机(您可以在亚马逊或某些在线商店中找到它们)
- 您必须打印3D模型,或者您可以使用纸板或塑料制作结构。
- 一些电线和一个小面包板
- 9伏电池和连接器
此外,您还需要使用arduino IDE
步骤2:校准舵机
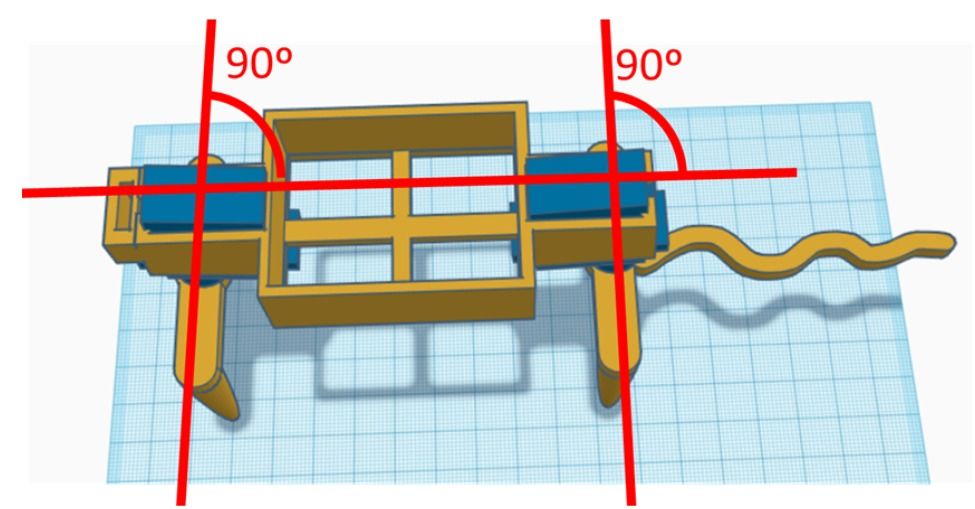
在启动机器人之前,您必须执行上一步。你需要找到伺服的中间位置。伺服可以转动180度(半个圆周),你需要先找到90度位置的位置才能使腿垂直于身体。为此,我编写了一个程序,将伺服系统置于90º位置。一旦伺服系统处于90º,您就会有一个参考点,指示伺服将在程序开始处的位置。
这是我用来使伺服器居中的程序:
#include
伺服前线;
伺服返回;
void setup(){
Front.attach(9);
Back.attach(6);
}
void loop(){
Front.write(90);
Back.write(90);
}
您必须对软件或硬件进行小幅调整,以改善机器人的移动和获得完美的步态,但首先让机器人移动,在项目结束时,您将能够进行这些调整。
步骤3:组装腿
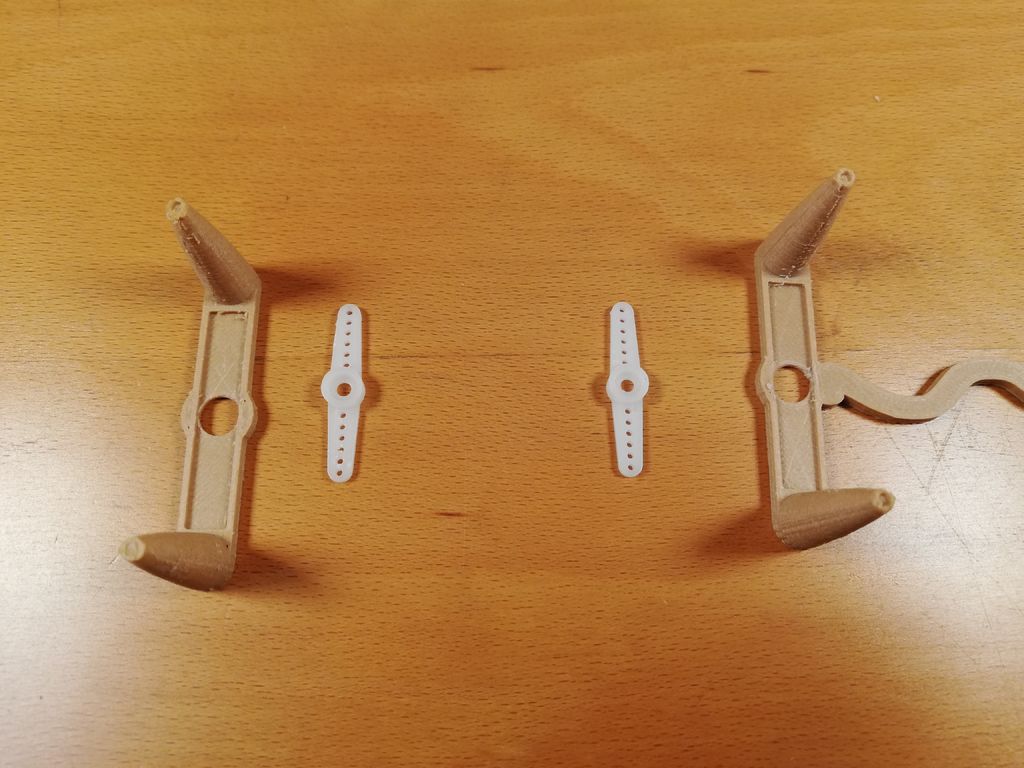
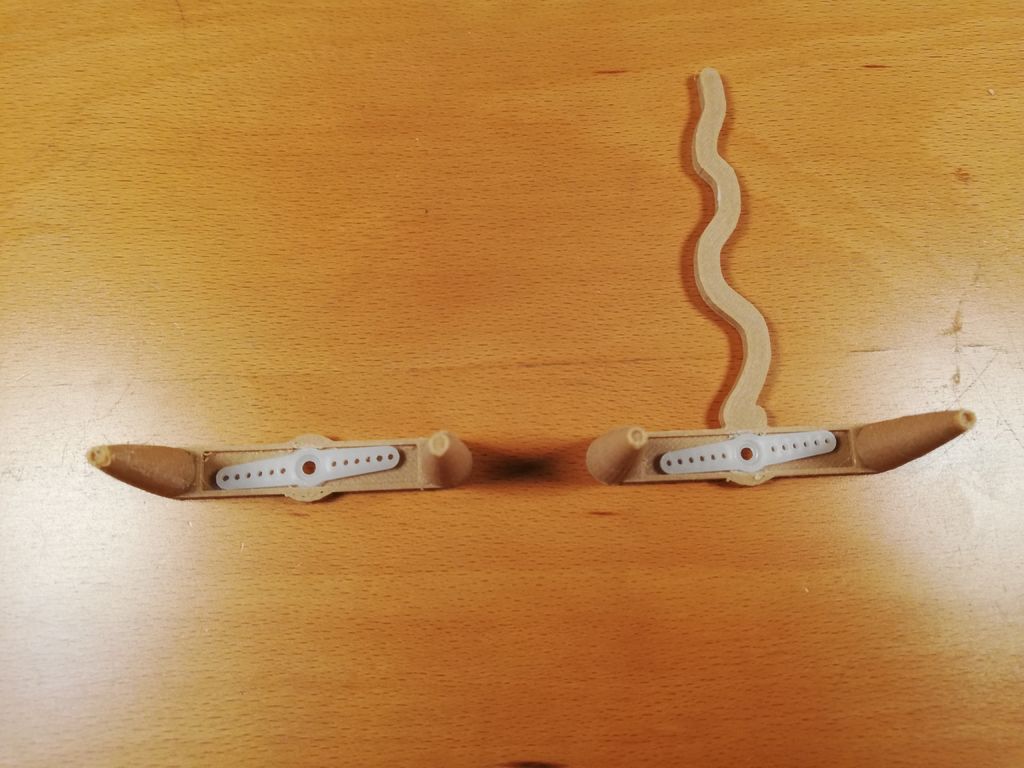
在此之后你必须把舵机的轴放到腿部。机器人,为了使这更容易,你可以在腿的孔周围切割一些材料进入那里的轴。
其次你需要将带有3D支腿的轴拧入伺服系统,当你所有人都在正确的位置时,在轴和腿之间放一点热胶,将它们固定到位。确保将腿放在90度,如步骤2所示。
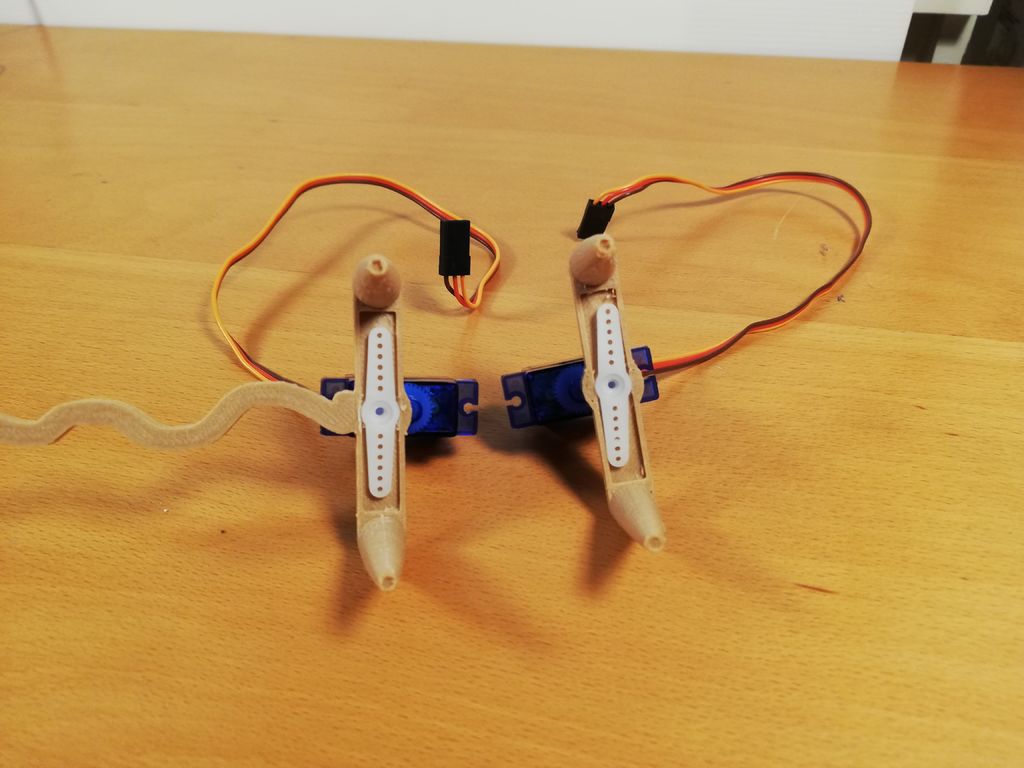
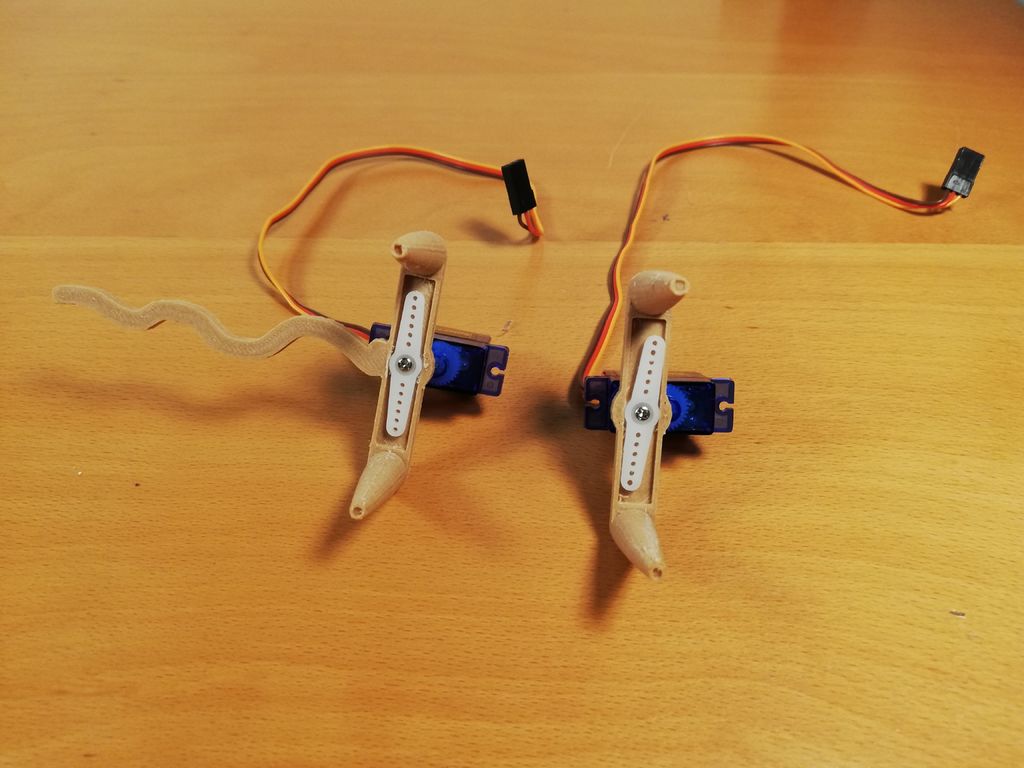
步骤4:安装舵机
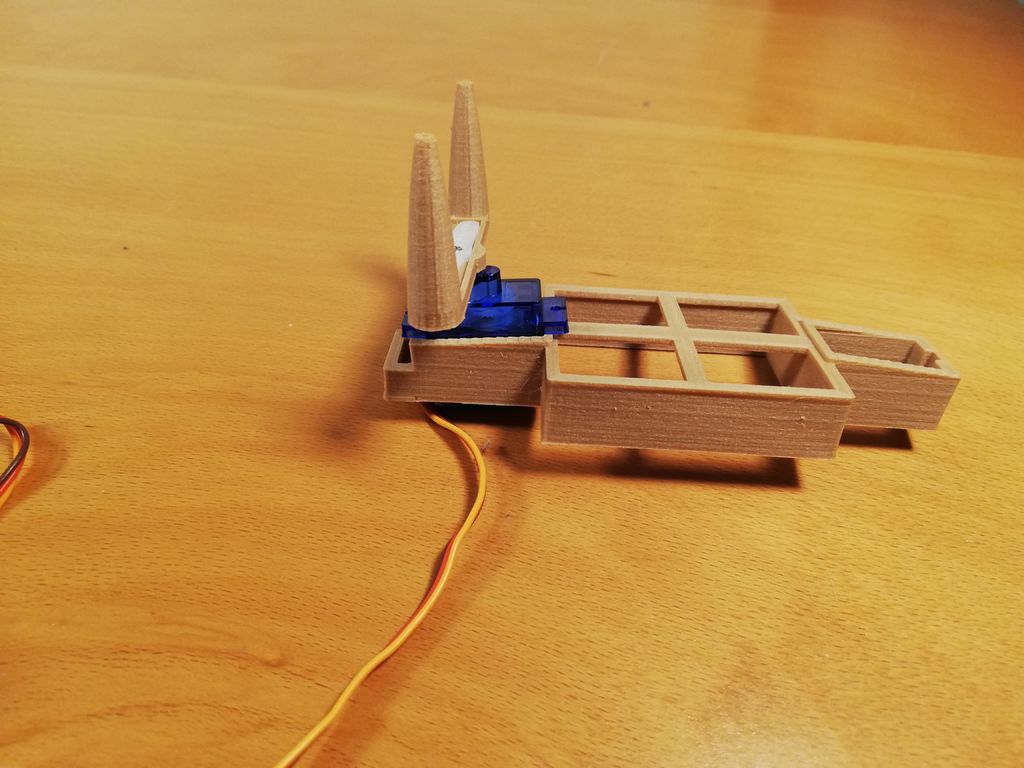
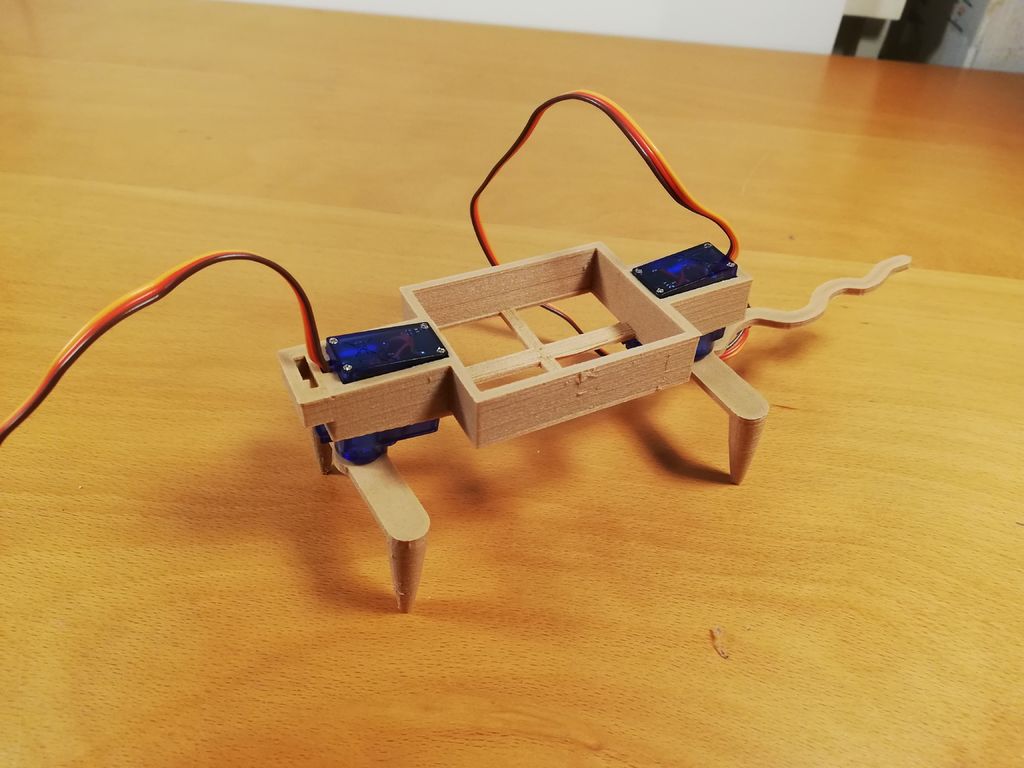
现在你必须在机器人的身体上安装舵机,为了做到这一点,你必须用一只手拿起身体,用腿将伺服推入一个洞,你有伺服。确保伺服电线的位置正确,否则伺服不适合机箱。伺服孔的一侧有一个小槽。将该插槽用于电线。
使用另一组支脚重复此步骤。
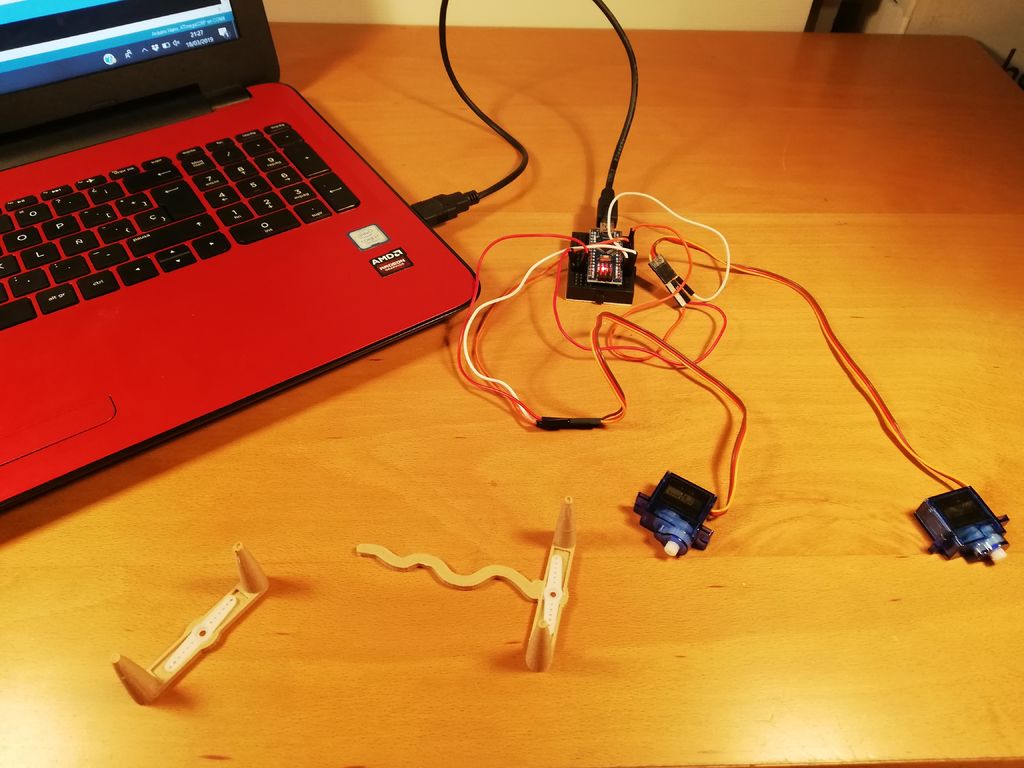
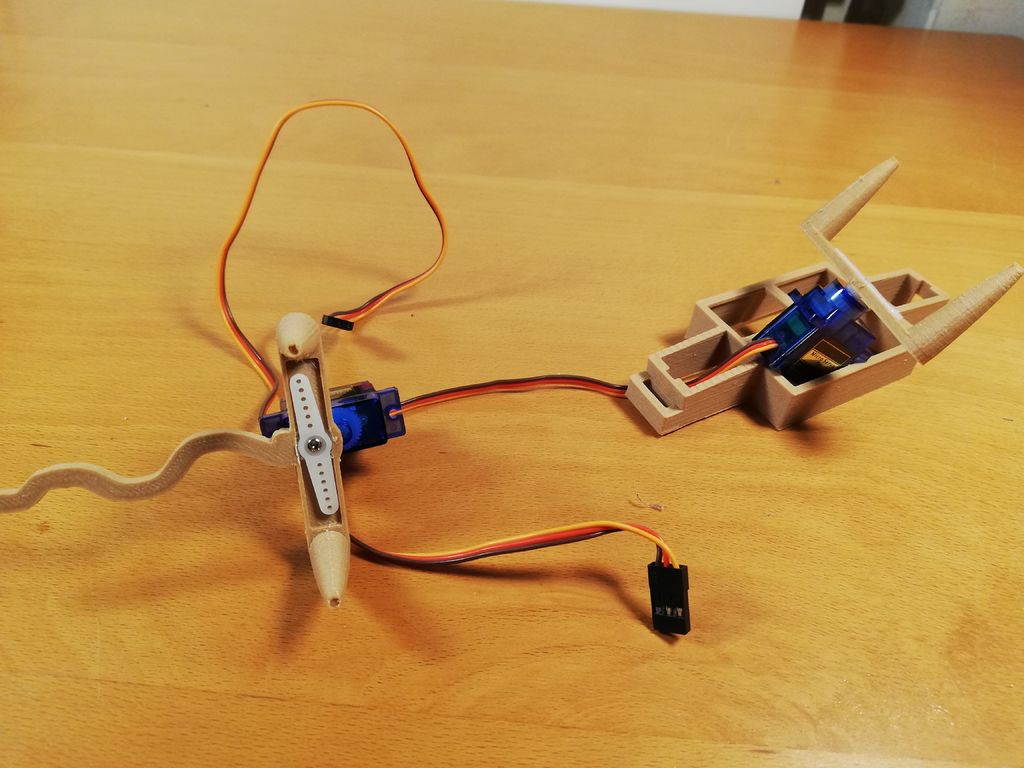
步骤5:添加Arduino
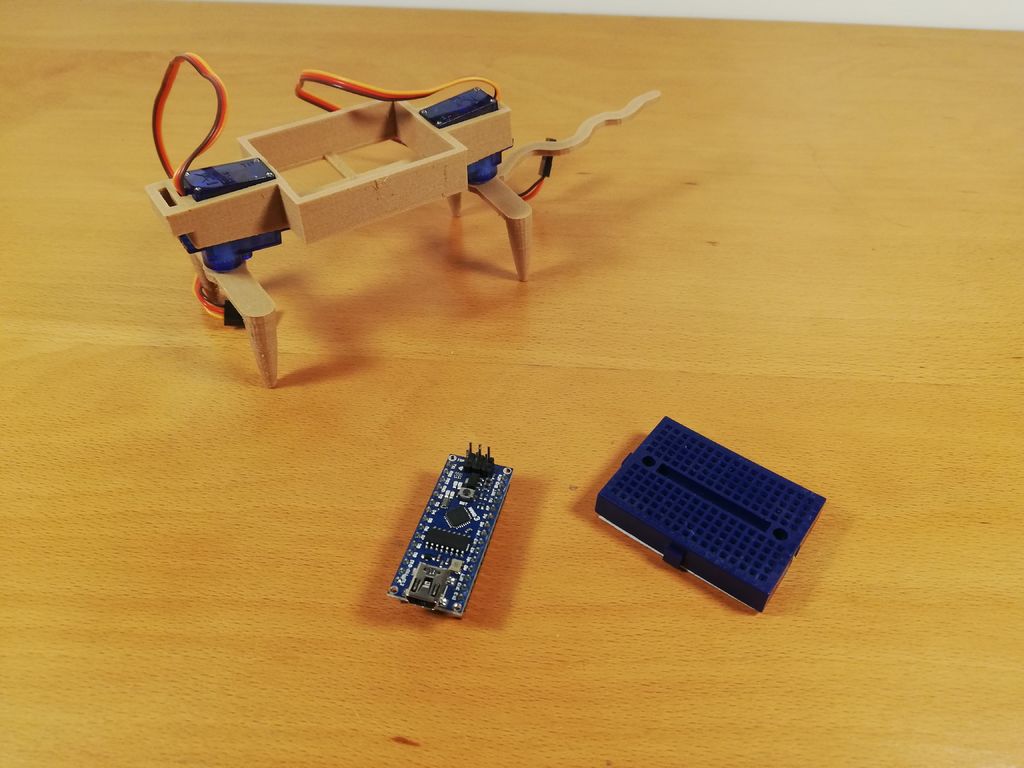
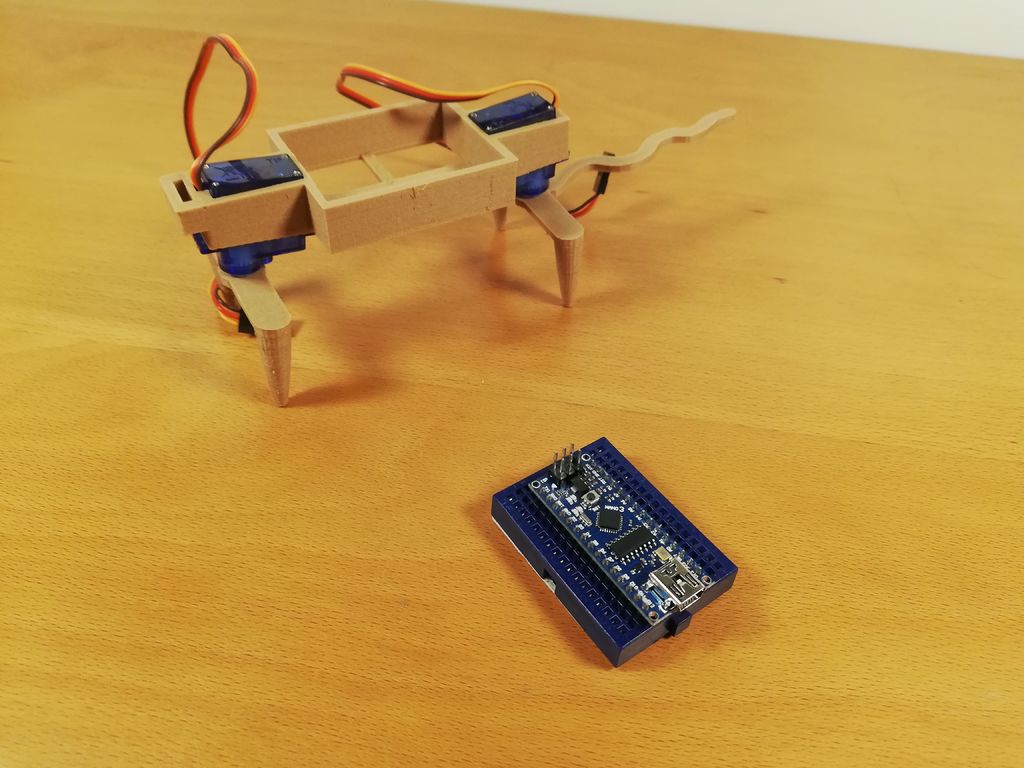
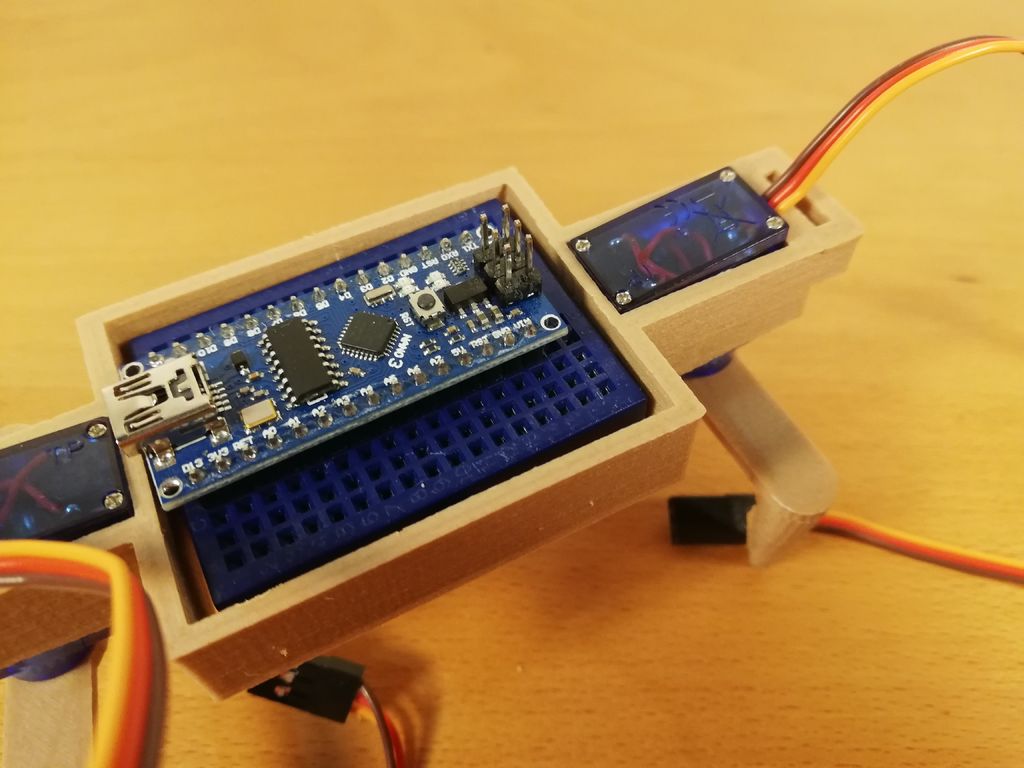
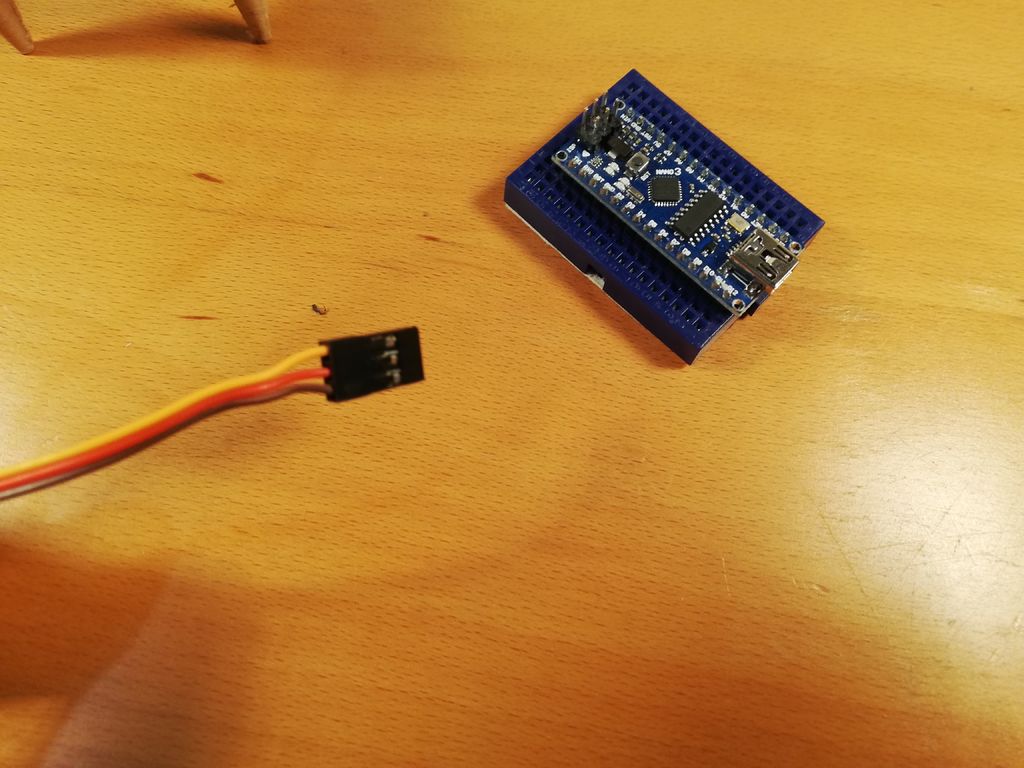
完成所有这些步骤后,您将完成机器人硬件。现在我们进入最后一部分,电子和布线。首先,拿Arduino Nano将其推入面包板,然后你必须将面包板底部的纸张取出并将面包板粘贴在3D模型中。
步骤6:接线
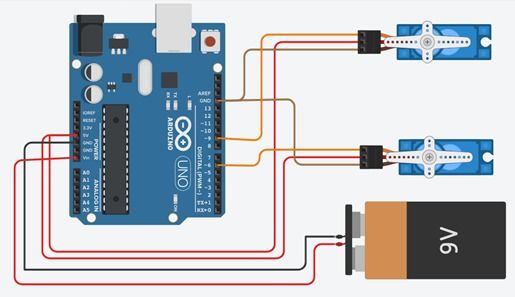
让我们做接线!在此步骤中,您将把面包板上的所有电线连接到伺服电机。
所有伺服系统都有三条线,所以一条用于arduino发送的信息,橙色一条,另一条用于+5v电流,红色电压,最后是GND(或接地)电线,这是棕色的。
要连接电线,您可能需要查看我们用于使伺服器居中的代码。在代码中我们可以看到前腿的伺服连接到引脚D9和另一个伺服,一个用于后腿和尾部它连接在端口D6。这意味着前伺服的橙色线连接到D9引脚,后腿伺服的橙色线连接到D6引脚。两个伺服电机的红色电缆变为5V,两个伺服电机的棕色电线连接到GND(Arduino Nano的任何GND引脚)。
第7步:和一些代码
要完成机器人,你必须把它带回来!所以这里有我最喜欢的部分,代码。
下面,我与您分享代码。让你的机器人走完一个完美的大门的关键是修改程序,使其完全适应你的老鼠的重量和平衡,但我只推荐这个,如果你知道一点arduino的编程。如果你的老鼠挣扎着走路,写下评论,我可以帮助你让你的老鼠走路一些风格!
这里有你使用的代码:
#include
Servo Front;
伺服返回;
void setup(){
Front.attach(9);
Back.attach(6);
Front.write(92);//我的前伺服,90度不完全笔直,所以我不得不将角度修改为92度。
Back.write(90);
延迟(1000);//机器人将所有腿垂直于身体并等待一秒
}
void loop(){
//此循环将一直运行到你拔掉机器人
//您可以修改移动之间的角度或延迟时间,使机器人走得更快或更慢,或者做出更大或更小的步骤
Front.write(132) ;
延迟(100);
Back.write(50);
延迟(300);
Front.write(50);
延迟(100);
Back.write(130);
延迟(300);
}
在arduino编程平台编写程序后,您可以将其上传到机器人中,看看它是如何移动的。
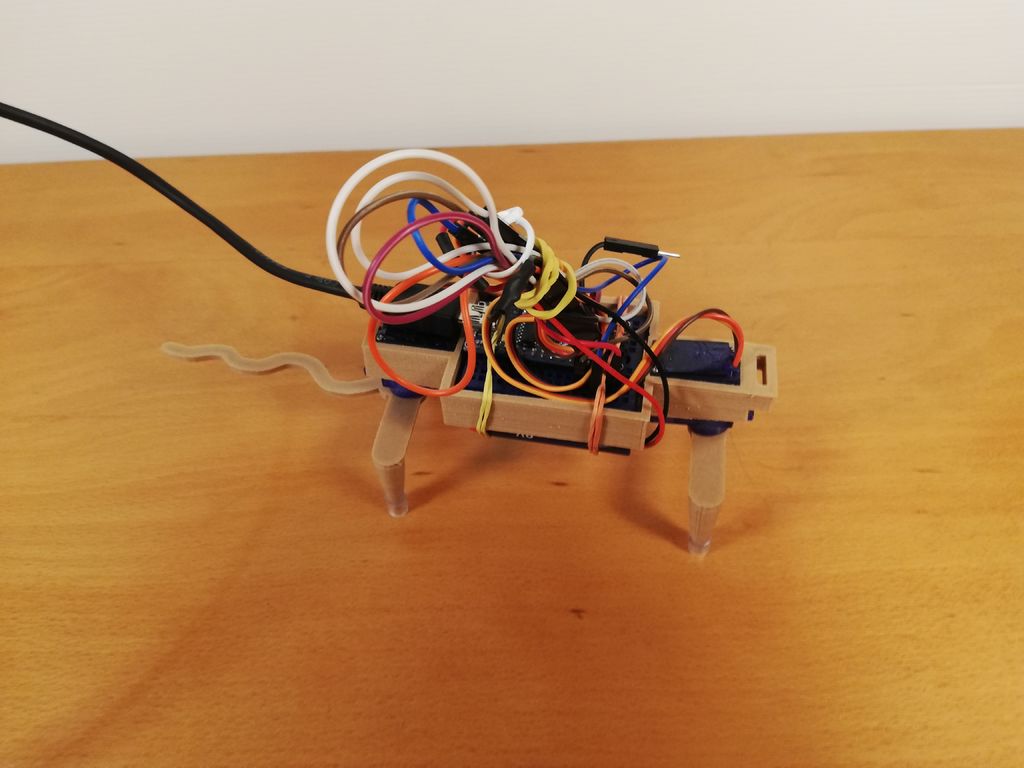
步骤8 :你完成了!
这个机器人组装起来非常简单,程序也很简单。很容易让它移动。..。..但要让它优雅地移动会非常复杂。如果你想开始构建和编程步行机器人,这对你来说是一个很好的项目。您将学习该项目如何编写“步态”,这是让您的机器人行走的指令序列。
-
机器人
+关注
关注
211文章
28476浏览量
207414
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
医疗机器人有哪些_医疗机器人有哪些应用
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
柔性机器人与刚性机器人区别与联系






 工商网监
工商网监
评论