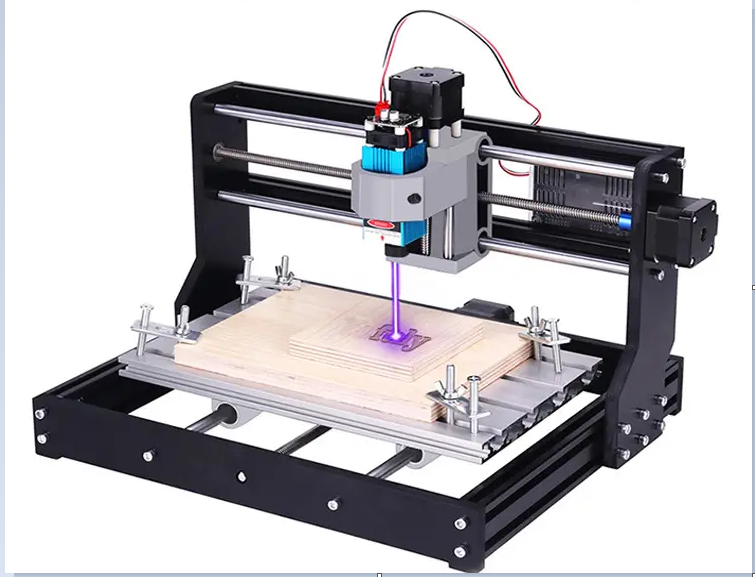
 3D打印激光雕刻机DIY图解
3D打印激光雕刻机DIY图解
第1步:物料清单
这是我购买的产品清单:
1x铝型材2020挤压,长度1 m
2x铝型材2040挤压,长度1 m
1x axel 8mm直径,长度约44cm
4x铝制角接头及相应的螺母和螺栓
1 x批滑动螺母(我买它的批次是20个。你不要全部使用它们。)
12x尼龙轮23毫米(内部尺寸5毫米)专门用于使用的型材
1个滚珠轴承,22毫米外,8毫米内部
2x GT2皮带轮,8mm孔,用于6 mm宽皮带(20齿)
1x GT2皮带轮,5mm孔,用于6 mm宽皮带(20齿)
1x柔性轴耦合器5 mm - 8 mm
2米GT2同步带6mm
2x NEMA17步进电机(1.8度/步,4.0 kg/cm)42BYGHW609L20P1X2,或simular
2x步进电机电缆,1米(如果您要使用电缆导管,则需要更长的电缆)
4x限位开关,孔距10 mm(印刷安装板用于此距离)
1x Aduino Nano
12x m6 x 30 mm螺栓
8x m5 x 30 mm螺栓,螺母和垫圈
4x m5 x 55 mm螺栓,螺母和垫圈
4x m3 xn mm(其中n是取决于m3孔深度的值)电机和7毫米板厚+长度(长距离公交车)
4x m3 xn mm(其中n是取决于电机中m3孔深度和7 mm板厚的值)
一些m4还需要用于皮带支架和限位开关安装板的螺栓
:
1x电容器100uF
1x电阻器220欧姆
1x led
1x按钮(电机释放开关)
1x合适的面包板
1x 12 V电源或适配器提供足够的安培。
1x TTL激光器,最好等于或大于500 mW。更高的功率可以很好地缩短雕刻时间!我使用的是2 W激光,确实很好。
当你做面包板时:
1x原型板/PCB玻璃纤维(34x52孔/9x15cm) )(或制作蚀刻的PCB)
1x插头插头2.1 x 5.5 mm插口(将焊接在PCB上并且适配器插头插入的部件)
要打印的东西:
LE3脚
LE3测试口径中央距离支撑轮LE3
LE3滚珠轴承口径21.5 22 22.5 mm
LE3距离公交车
LE3电机和对面
LE3 laser_motor holder
LE3皮带支架20x40框架
LE3限位开关安装板20x40框架
LE3电缆夹20x40框架
如果需要:
LE3电缆安装座和PCB安装
第2步:STL打印文件
第3步:3D打印部件
这些都是印刷品
第4步:您需要的工具
您需要的大多数硬件可能都在您的工作室中,例如:
Plyers
螺丝刀
烙铁
Tieraps
丝锥和模具
卡尺
真的不多。但最重要的是拥有或有权使用3D打印机。
第5步:准备工作
按以下长度切割型材:
2020型材:每件37厘米2件
2040型材:2件55厘米,每件1件42厘米。
你可以用钢锯看到型材但是如果你有机会使用工业微调锯(就像我做的那样),你必须使用它。结果要好得多。
现在你有5个框架。见 pic。 1
接下来要做的是在所有2040个配置文件中点击M6线程。见 pic。 2
这些实际上是您必须做的唯一准备工作。
步骤6:主框架
将主框架放在一起简单直接前进(图1和2)。完成后你就可以很好地了解它的大小。
之后打印脚,“ LE3脚” (图3),钻出6毫米的孔,然后用8米6的螺栓将它们用螺栓固定在框架上。
正如你所看到的那样,我没有打印出一个完全厚重但一侧空心的零件。这节省了大量的灯丝和印刷时间,而且非常强大!光滑的一面进出(图4)对于坚固没有任何区别,这是一个美容选择。
第7步:确保打印正确,并且将载体放在一起
确定打印机的打印精度非常重要。为此,我制作了一些测试口径:
这样做:
打印“ LE3 距离巴士“(白色 pic.2 )
打印” LE3测试口径中央距离支撑轮“和” LE3 滚珠轴承机芯“
用5 mm钻头钻出轮轴(5mm螺栓)的孔
留在 PIC。 1 是一种测试口径,用于确定滚珠孔必须打印多大才能让它贴合。有三种不同的尺寸:21.5,22和22.5毫米。这些是印刷设计中的价值观。轴承最合适的孔(你需要用力将它放入)是你需要的。
右边你看到了测试导轮之间距离的口径。重要的是2040框架和车轮之间没有游隙。你可以用这个口径来解决这个问题。只需将5个螺栓和垫片固定在三个轮子上,然后尝试在框架移动的距离(58或59 mm)内通过车轮产生一些阻力。
注意:
我使用了22.5毫米的球轴孔和58毫米的轮距。这对我来说非常适合。如果这些值对您不起作用,那么您必须修改设计。
确定正确的尺寸后,打印“ LE3 电机和对面“,首先钻出两个板上的孔。
把马车放在一起(图2)。
你需要2040框架,长42厘米,电机和支承板,4 m6螺栓,8 m5螺栓
钻出孔:电机孔为3毫米,轮轴孔为5毫米,孔为6毫米,将板固定在型材上
螺栓其中一个板上的两个上轮(在公共汽车和车轮之间使用5mm垫圈,车轮必须自由转动!)
将这些车轮放在车架上时,组装下两个轮子
对另一侧进行相同的操作( pic.2 ,电机板在前面,轴承板在后面)
带有4 m6螺栓的螺栓,板之间的2040框架
现在您可以移动托架了。如果你感觉到一些阻力就可以了,它会让你觉得没有游戏。电机足够强大,可以处理。
这个程序集实际上是如何将这台机器的其余部分放在一起的一般方法。从现在开始,我将不那么扩大,只会指出重要的事情。图片也说很多。
步骤8:Axel和Motor
使用4条长途巴士将电机固定在板上(你必须弄清楚螺栓的长度,它取决于电机孔的深度)
将轴承放到位
将8毫米轴推入轴承,同时将8毫米滑轮和5毫米-8毫米柔性轴联轴器放在轴上
将所有部件固定到位,使滑轮齿正好位于槽的上方框架
步骤9:激光/电机支架和皮带
激光/马达支架:
打印“ LE3 laser_motor holder ”
打印“ LE3皮带支架20x40框架“
钻出3.2 mm的皮带支架并在孔中轻敲4mm螺纹
钻出激光孔/马达浩适当的直径。激光器侧的额外孔用于安装我尚未设计的通用激光安装板。
完成激光/马达支架的组装
暂时取走托架的2040轮廓
将轮廓滑过车轮。如果你必须努力推动配置文件低谷,那就没关系了。当我将框架垂直于地面时,即使电机组装完毕,重力也不会移动激光器/电机支架。
两侧放置皮带架
再次将激光器/电机座放回原位。
在 pic上。 1 你可以看到它是如何放在一起的(图片是在后期拍摄的。我忘了先制作一张)。 不要忘记公共汽车和车轮之间的垫圈!请不要介意激光,这只是一个测试组件。
皮带。首先是激光支架中的一个:
将带子带到车轮下方和滑轮上,就像 pic一样。 2
在皮带支架下方的两侧引导皮带(确保您有足够的皮带长度,以便您可以抓住两侧的皮带)
在一侧将皮带支架尽可能地推到侧面并固定螺栓(不要紧紧地将其紧固)
现在在另一侧做同样的操作并同时拉上皮带和皮带轮之间有合理的张力
对于滑架的两条皮带(图3和4)做同样的事情,但不同之处在于你只需要转开一只脚(取下顶部螺栓并松开底部螺栓)并在一侧插入两个皮带固定器。现在您可以将另一个滑动到滑架下方另一侧。还要确保在张紧两个皮带后,滑架完全成直角!
结果
PS。
如果您在较早阶段打印皮带支架,可以在装配前将它们插入框架中。
步骤10:限位开关+支架
首次打印:
LE3限位开关安装板20x40框架
LE3电缆夹20x40框架
在图片上。在图1和图2中,您可以看到主机架上装配的限位开关。它们之间的距离约为。 45厘米(38厘米雕刻距离+ 7厘米板宽)
在图片上。 3和4限位开关在横杆上,距离:36厘米(29 + 7)。装配后检查开关是否位置正确(没有机械碰撞)。
现在所有的机械工作都已完成。
您可以连接开关并使用电缆夹将电线固定在横向框架槽中。
步骤11:电子设备

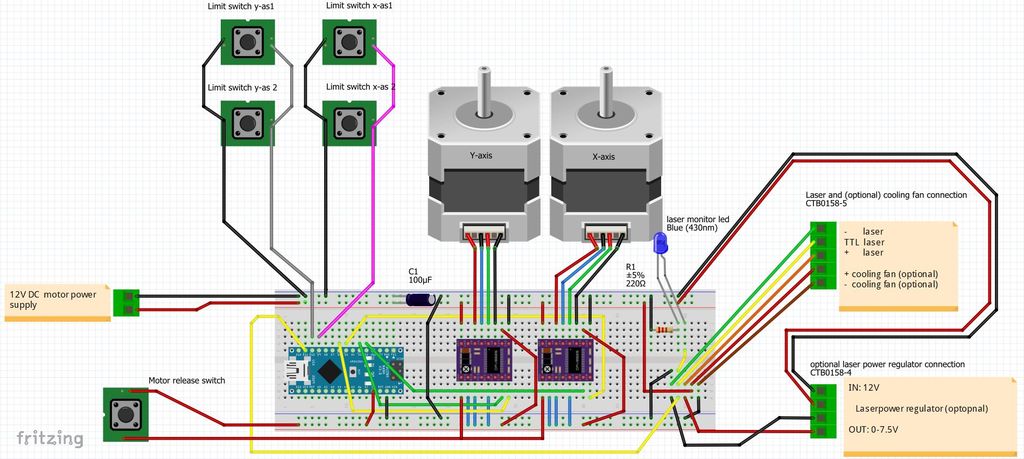
Pic。 1 示意性地显示了部件之间的连接
P ic。 2 面包板连接应该如何。
的产品图。 3和6 现实中的面包板
Pic。 4 我制作的原型板的电线侧
Pic。 5 部分方面。注意Arduino,驱动板和所有电线连接的所有母头连接。这些连接让开关板(当有必要时)变得更加容易。
我为9x15 cm原型板设计了moutning brakets,这样你就可以将电路板固定到2020型材上。这些支架是“LE3电缆安装和PCB安装”打印文件的一部分( pic.7和8 )。
每个驱动板上有3个连接来控制步进分辨率:M0,M1和M2。通过这些连接,您可以根据如何将这些连接连接到+ 5V来确定步进分辨率。因为我已经为两个潜水员的3条线路中的每条线路制作了原型板跳线。它们位于 pic上的黄色圆圈中。 5.
使用这些跳线,您可以轻松设置步进分辨率:
M0 M1 M2分辨率
低低低满
高低低半
低高低1/4
高高低1/8(这是我使用的设置
低低高1/16
高高高1/32
高位意味着:连接到+ 5V(闭合的跳线)。
你不会在面包板或原理图上找到这些跳线,但是如果有必要的话,你可以自己实现它们。
您可以省略这些跳线并将步进分辨率永久设置为所需的步进分辨率。到目前为止,我还没有改变跳线设置:1/8分辨率工作正常!
你也找不到 pic上的开关。 5 (右上角)。我已经实现了这个开关,在Arduino板上的D12和D11之间切换,用于控制激光器。 M03和M04(Gcode)。但我发现,使用正确的程序,您不必再使用M03,所以我将其排除在计划之外。相反,TTL线直接连接到D11(M04)。
Ps。
请注意,在scematics上,两个连接器(5线和4线)是必需的我,因为我自己用一个单独的冷却风扇来构建我的激光系统。但是,如果你有一个激光模块,你不想调节激光的功率。您只需要5线连接器的3条上线,电源应来自激光器附带的电源。
步骤12:软件



用于以下目的的程序这个教学:
GRBL,版本1.1(arduino库)
LaserGRBL.exe,用于将切片图片或矢量图形发送到雕刻机/切割器的程序
Inkscape,矢量绘图程序
JTP激光工具V1.8,Inkscape为LaserGRBL制作Gcode文件所需的插件
Notepad ++
在互联网上,您可以找到有关如何安装,下载和使用这些程序的大量信息。
您要做的第一件事是更改 config.h 文件GRBL库:
使用Notepad ++下载GRBL v1.1 open config.h后(您可以在GRBL目录中找到 config.h )
找到你在 pic上看到的行。 1,2和3 并根据图片的右侧部分更改它们(在图片左侧看到原始线条和右侧更改的图片)
保存文件
现在将GRBL库加载到Arduino nano控制器中:
将Arduino连接到电脑
启动Arduino程序
选择草图
选择导入库
选择添加库
转到GRBL所在的目录,然后在GRBL目录(更改config.h文件的目录)上单击( not open )
单击打开
忽略未解决的bla bla bla消息并关闭Arduino程序
转到。.. GRBL/examples/grblUpload 目录然后启动 grblUpload.ino
现在Arduino程序启动并开始编译。完成后,忽略太少的内存空间消息并关闭Arduino程序。
在此阶段,Arduino板上装有GRBL,并且Homing和限位开关的设置正确。/p》
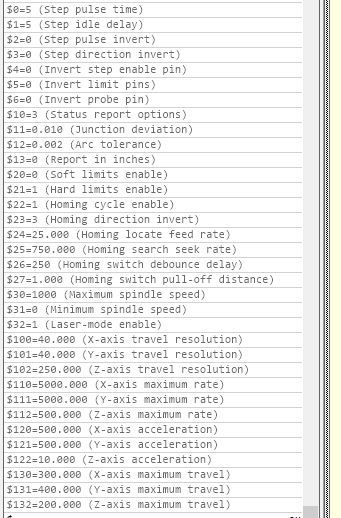
现在你必须让Arduino板上的GRBL知道你的雕刻师需要什么样的速度,尺寸等等。
将你的Arduino连接到你的电脑
启动 laserGRBL.exe
点击连接按钮(波特率字段旁边)
类型发送命令字段中的$$ (在进度字段下方)并按[Enter]
根据 pic上的列表更改值。 4 即可。只需在发送命令字段中输入必须更改的行(在进度字段下方)。例如:键入$ 100 = 40 [Enter]
对要更改的所有行重复此操作。
之后你可以再次输入$$来查看或所有机会都是正确的
当你执行testrun时,见下文,你还需要调整数量转向电机的电流。您可以在两个踏板上转动小修剪器来做到这一点,但在此之前断开电路板的电源。 下载并阅读踏板数据表!逐步调整修剪器,直到电机平稳运行并且不会松动一个步骤。我的电路板上的修剪器大约向右转3/4。
现在你可以测试雕刻师看到或所有的动作是否正常,非常重要!,如果限位开关正常工作。如果激活限位开关,机器将进入错误状态。在laserGRBL中你可以阅读如何解决基于软件的,$ x或类似的东西,现在电机释放开关派上用场:在错误状态下,其中一个开关仍然可以激活,现在按下电动机释放开关,将所需的滑架从开关上拉一下,将其松开。现在您可以“重置”和“归位”机器。
基本上您已准备好进行第一次校准运行。
步骤13:校准
以下程序是我的“快速,肮脏和便宜的激光雕刻机”的一部分的摘录,可以指导并且可以如果您的雕刻输出测量值存在偏差,请提供帮助。
“对于100美元(x,步长/mm)和101美元(y,步长/mm)的校准,我做了以下:
我为100美元和101美元填写了价值80左右
然后我画了一个给定尺寸的正方形,比如在Inkscape中说25毫米并开始雕刻**
第一个结果不应是尺寸合适的正方形,25x25mm。
从x轴开始:
让我们说 A 是100美元的值, B 是$ 100(80)的值, C 是Inkscape(25)中的值, D 是您在雕刻方块上测量的值(40 o r so)
然后 A = Bx(C/D)
在此示例中,$ 100的新值( A )是80x(25/40)= 80x0,625 = 50
你可以用y轴($ 101)做同样的事情。
结果相当准确。如果你在x轴和y轴上使用完全相同的电机,皮带和皮带轮,那么$ 100和$ 101的值应该是相同的。“
**如果在Inkscape中制作校准方块,请使用 JTP激光工具V1.8 插件制作一个(矢量)Gcode文件,你可以加载到laserGRBL。确保你填写M04开启,M05关闭激光器在 JTP激光工具V1.8 插件!
步骤14:准备好了!
如果一切正常,你现在已经雕刻了一个大小正好为25毫米的正方形。
现在你可以雕刻/剪切你喜欢的任何东西:灰度图片,矢量图,图案到切割等。准确度很高!
pic.1 ,底部字符非常小(标尺上两条线之间的距离为1mm)
pic.2,一些首次灰度结果。
PIC。 3 ,非常准确!
视频显示雕刻工作。
步骤15:最后一步
现在一切正常,您可以从电缆导轨和漂亮的PCB微调装置开始。我已经创建了一些电缆导向架,可以打印并用于连接电缆导向器(打印文件“LE3电缆安装座和PCB安装架”)。
如果您确实使用了电缆导管,那么1米长的电机电缆不够长,您必须购买更长的电缆或制作电缆延长线(这就是我所做的)。在图片上,您可以看到我如何使用电缆导向器(和安装座)。而且说实话,电缆引导使得雕刻变得更加容易,因为您不必担心烧坏的电缆或部件之间卡住的电缆等。
-
激光雕刻机
+关注
关注
8文章
32浏览量
15123 -
3D打印
+关注
关注
26文章
3549浏览量
109087
发布评论请先 登录
相关推荐
uvled光固化3d打印威廉希尔官方网站

UV光固化威廉希尔官方网站 在3D打印中的应用
激光3D打印设备的威廉希尔官方网站 优势
ARMxy嵌入式计算机:雕刻机自动化的新标准

物联网行业中的模具定制方案_3D打印材料选型分享
全自动雕刻机:马达驱动芯片MS3142S的应用案例

工业平板电脑雕刻机设备上的应用

桌面型激光雕刻机的发展前景及TMC应用优势
选择PCB电路板雕刻机?这些威廉希尔官方网站 参数你必须了解

深圳恒兴隆机电|雕刻机电主轴导致容易损坏的原因.
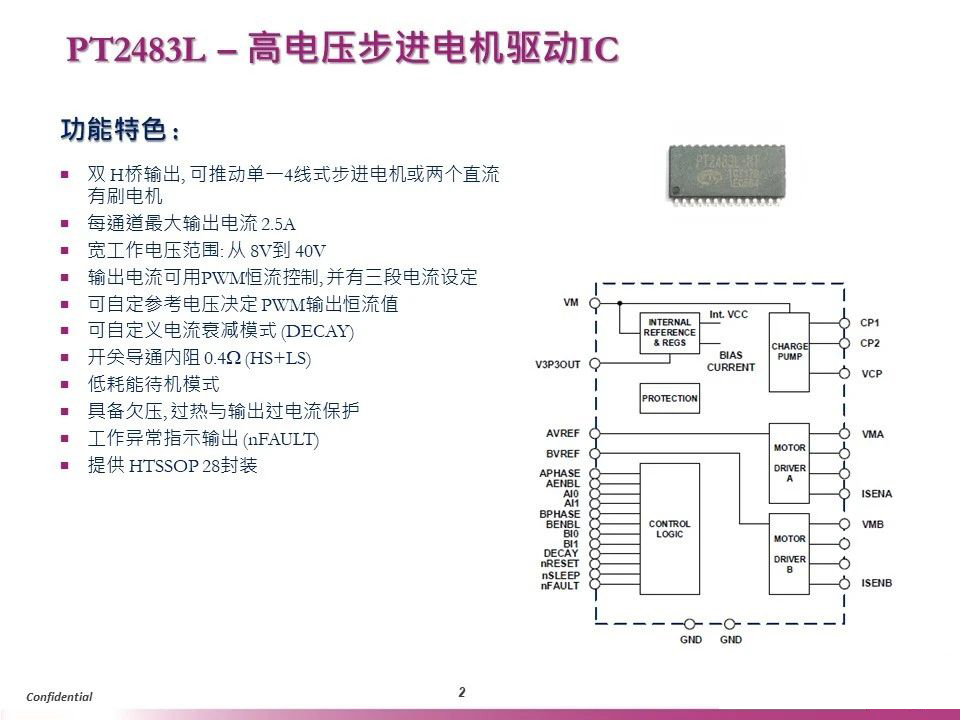
PT2483L – 高电压步进电机驱动IC





 工商网监
工商网监
评论