基于IMC以及系统辨识的控制器参数确定算法
大小:0.68 MB 人气: 2018-01-03 需要积分:2
标签:控制器(173592)
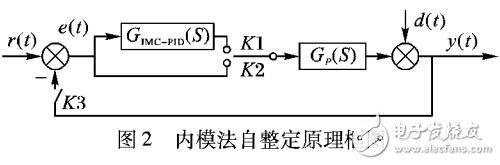
为解决传统工业控制中比例一积分一微分( PID)控制器参数整定的问题,提出了一种基于内模法(IMC)以及系统辨识的控制器参数确定算法。该方法首先利用被控过程在开环阶跃信号激励下,输入与暂态输出的对应关系,将被控对象辨识为一阶加滞后( FOPDT)或二阶加时滞(SOPDT)的模型;再利用IMC算法确定控制器的参数。对于在内模法中引入的滤波器参数A的确定问题,提出通过引入y和a两个参数,并与输出误差的平方建立关系来确定A的方法。仿真显示,对于输出误差绝对值之和(IAE)这个指标,该种算法与传统基于IMC的PID控制算法相比,在无输入扰动时可提高20%左右,在有输入扰动时可提高10%左右。仿真结果表明:在用单位阶跃信号激励系统时,提出的整定方法在保证了系统鲁棒性的前提下,提高了系统的瞬态响应速度,并有效抑制了系统输出的超调。
非常好我支持^.^
(0) 0%
不好我反对
(0) 0%
下载地址
基于IMC以及系统辨识的控制器参数确定算法下载
相关电子资料下载
- NCL2801安森美功率因数控制器, 高效、 增强照明 59
- BMS电池管理系统故障如何解决 79
- CAN不通讯导致CE电流法测试超标整改分析案例 55
- 个人机智云开发实践:经验总结与威廉希尔官方网站 分享 49
- 经纬恒润新一代高压电池管理系统成功量产 137
- 昂科烧录器支持Nuvoton新唐科技的32位微控制器M0516LDN 29
- 巡线机器人电路图 巡线机器人的工作原理和应用领域 114
- SC3001是一款高性能、多模式的飞回PWM控制器USB-PD和QC充电器AC-DC适配器 132
- SC215TA是C型/ PD和DPDM快速充电控制器,集成了内部反馈补偿PD3.0快充 55
- NCL30159AA带HB驱动器LLC变换器控制器电动车电池充电器 50