DSP与FPGA设计的跟踪伺服运动控制威廉希尔官方网站
摘 要: 在分析光电跟踪伺服系统特点的基础上,以TI公司DSP芯片TMS320F2812作为主控制芯片,采用FPGA进行逻
2010-05-15 18:22:52 1420
1420 
交流伺服系统包含交流伺服驱动器和伺服电机。选用伺服系统,主要为了进行精密的定位控制,伺服驱动器在位置控制模式下运行,控制框图如图一所示。
2022-12-05 10:03:411734 威廉希尔官方网站
已迎来了新的发展机遇,伺服系统由传统的步进伺服、直流伺服发展到以永磁同步电机、感应电机为伺服电机的新一代交流伺服系统。伺服系统是自动控制系统的重要组成部分,它的性能优劣直接决定与影响着自动控制系统
2018-10-26 11:47:19
什么是伺服系统?伺服系统是由哪些部分组成的?伺服驱动器的原理是什么?伺服控制系统有哪几种控制方式?
2021-10-11 08:03:33
1.定义伺服来自英文单词“servo”,指系统跟随外部指令进行人们所期望的运动,运动要素包括位置、速度和力矩。伺服系统的发展经历了从液压、气动到电气的过程,而电气伺服系统包括驱动器伺服电机、反馈装置
2021-06-28 06:51:52
及现代控制威廉希尔官方网站
的进步,经历了从步进到直流,进而到交流的发展历程。本文对其威廉希尔官方网站
现状及发展趋势作简要探讨。 一、数控机床伺服系统 (一)开环伺服系统。开环伺服系统不设检测反馈装置,不构成运动反馈控制回路,电...
2021-09-17 09:10:53
已经被广泛应用,人们对伺服性能的要求也在不断提高。 伺服驱动器有两部分组成:驱动器硬件和控制算法。控制算法是决定交流伺服系统性能好坏的关键威廉希尔官方网站
之一,是国外交流伺服威廉希尔官方网站
封锁的主要部分,也是在威廉希尔官方网站
垄断的核心。 伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件...
2021-06-28 10:07:35
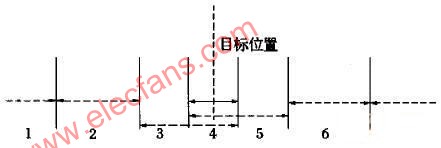
误差形成原因与克服办法伺服系统控制过程为:升速、恒速、减速和低速趋近定位点,整个过程都是位置闭环控制。减速和低速趋近定位点这两个过程,对伺服系统的定位精度有很重要的影响。减速控制具体实现方法很多,常用
2023-03-08 09:37:19
伺服系统的发展趋势1、交流化伺服威廉希尔官方网站
将继续迅速地由DC伺服系统转向AC伺服系统。从目前国际市场的情况看,几乎所有的新产品都是AC伺服系统。在工业发达国家,AC伺服电机的 市场占有率已经超过80
2021-09-10 07:56:26
伺服系统有哪几种控制方式?伺服系统的工作原理是什么?有哪些性能?
2021-09-23 08:39:15
伺服系统由哪几部分组成?伺服系统常用的参数有哪些?如何选择伺服电机?伺服驱动器控制原理是什么?
2021-09-26 08:26:53
完全数字化的伺服系统。全数字化的实现,将原有的硬件伺服控制变成了软件伺服控制,从而使在伺服系统中应用现代控制理论的先进算法(如:最优控制、人工智能、模糊控制、神经元网络等)成为可能。 (3)采用新型
2019-06-24 05:00:50
伺服系统国内外研究现状如何?伺服系统的发展趋势是怎样的?伺服系统相关威廉希尔官方网站
是什么?
2021-09-30 07:29:16
伺服系统的机械时间常数是什么?伺服系统的电气时间常数是什么?求大神解答
2021-09-30 08:16:25
利用周期性的正余弦位置指令和转矩指令实现转动惯量离线辨识。 李俊 电机与控制应用 1 伺服系统动力学模型 伺服电机的运动方程为 2 传统转动惯量离线辨识算法的局限性 式(1)中,可以通过测量得到
2023-03-01 13:59:53
交流伺服电机的工作原理伺服系统的组成及分类伺服马达(交流)的特点伺服控制的选型步骤
2021-02-22 07:55:20
伺服系统控制框架是由哪些部分组成的?伺服系统控制包括哪些参数?
2021-10-11 09:05:11
`1、前言交流伺服系统以交流电移动部件的位置和速度作为控制量的自动控制系统。伺服控制系统由:运动控制器、伺服控制器、PWM 放大器、伺服电机、负载、反馈处理器等几部分构成。其中伺服控制器、PWM
2018-05-23 17:10:25
高伺服系统的动态响应速度和稳态精度的途径有两条:一是采用高性能的伺服电机,提高系统的硬件性能;二是采用新的控制方法,提高软件系统的性能。目前,后者更有利于提高系统的位置控制精度,降低跟随误差[1
2009-05-17 11:38:44
装置(直线感应同步器、长光栅等)对数控机床工作台位移进行直接测量并进行反馈控制的位置伺服系统,其控制原理见图 闭环控制系统将数控机床本身包括在位置控制环之内,因此机械系统引起的误差可由反馈控制得以消除
2023-03-21 17:53:51
有效的分布式伺服系统。将伺服驱动器和伺服电机组合在一个设备中,可节省控制柜中的空间,并可节省更多成本。集成的安全力矩关闭(STO)和SS1 运动安全功能等,通过减少对这些任务的单独I/O 端子或其它硬件
2023-03-03 16:04:20
基于Labview的气动伺服系统辨识程序,哪位朋友做过的帮帮忙,搭建的系统跟论文《基于 LabVIEW 的气动比例伺服系统模型辨识研究》中的模型一样。
2016-04-19 15:56:52
哈工大 计算机仿真威廉希尔官方网站
实验报告 实验8基于Simulink的伺服系统仿真.doc (5页) 本资源提供全文预览,点击全文预览即可全文预览,如果喜欢文档就下载吧,查找使用更方便哦!9.90 积分实验
2021-09-17 08:31:27
基于永磁同步电机伺服系统的控制算法是什么?如何对一种基于永磁同步电机伺服系统的控制算法进行仿真?
2021-07-13 08:12:47
如何用STM32控制一个三轴伺服系统?
2021-09-26 08:56:25
怎么实现伺服系统中的滤波器?
2021-10-09 06:27:28
和伺服机构控制的重要部分。因而要了解机器人的运作过程,必然绕不过伺服系统。伺服系统伺服系统是以变频威廉希尔官方网站
为基础发展起来的产品,是一种以机械位置或角度作为控制对象的自动控制系统。伺服系统除了可以进行速度与转矩控制
2018-10-12 11:01:08
仿真研究。文献[ 2 ] 研究了基于RBFNN 的PID控制在电液位置伺服系统中的应用。文献[ 3 ]对电液位置伺服系统采用滑模变结构控制, 用最优控制理论设计滑模平面, 均取得了良好效果。但大量文献
2019-08-21 06:13:08
请问一下运动控制卡中伺服电机的规划位置与编码器位置的区别是什么?
2021-10-12 11:24:30
如何实现轴角编码器在伺服系统中的应用?ZSZ数字化轴角编码器模拟速度反馈信号的处理方法是什么?怎么进行ZSZ轴角编码器数字位置信号的采集和远距离传输?
2021-04-20 06:49:44
贴片机常用控制系统结构主要包括下面两方面,这两方面主要实现的是点对点的位置控制。 (1)位置和速度反馈都来自伺服电动机本身 这种控制方式的优点是对整个闭环伺服系统控制环路的要求较低,适用于
2018-09-04 16:04:08
伺服系统一般无法达到这 一理想状态。 在典型的伺服系统中,齿隙(backlash) 是由传动元件的机械公差引起的电机与负载之间的运动损失。这包括整个齿轮箱、皮带、链条和联轴器的运动损失。在机器启动时
2023-03-09 15:11:35
本章将详细讨论进给伺服系统的软件硬件结构;进给伺服系统基本功能的原理及实现方法。进给伺服系统是数控系统主要的子系统。如果说CNC装置是数控系统的“大脑”,是发布
2009-02-16 00:21:31 0
0 介绍了一个用于水下运动目标轨迹测量系统的机电伺服系统。该系统由两部分构成:机械装置与控制单元。该伺服系统使测量系统能够在水平平面或垂直平面上转动,从而扩大测量
2009-06-22 14:48:1211 位置伺服系统中先由位置给定量与反馈量的差值经过位置调节器的调节产生速度给定量,再由速度给定量与速度反馈量的差值经过速度调节器的作用最终实现准确的定位。由上述位
2009-07-02 08:53:3719 伺服系统的扭矩控制(Toque Control)和速度控制(Velocity Control)?一般定位上的伺服系统之伺服马达控制方式可分为扭矩控制(Toque Control)及速度控制(Velocity Control)两类,这两种控制方式都
2009-07-04 08:30:1253 转角-线位移式全闭环位置伺服系统及误差分析::在一些精度要求比较高的应用场合,半闭环的位置伺服系统不能满足要求。文中提出采用转角-线位移式全闭环位置控制方法,光栅
2009-07-05 21:34:2121 低速位置伺服系统中的非线性摩擦力、参数摄动以及外部扰动等因素都会降低系统的精度. 本文对无刷直流电机低速位置伺服控制方法进行了研究. 简要介绍了自抗扰控制器,利用Stribe
2010-03-01 16:31:4443 伺服系统的PID控制
伺服系统的摩擦动态特性是非常复杂的,目前已经提出了许多摩擦模型。
2010-05-04 16:05:5351
全数字伺服系统中位置环和电子齿轮的设计
摘要:分析了伺服系统中位置环和电子齿轮的工作原理,同时介绍了一种
2009-07-11 09:44:26992 
随着计算机威廉希尔官方网站
和现场总线威廉希尔官方网站
的发展和成熟,也促使伺服系统的实现方式和体系结构在不断地发展,将现场总线应用于运动控制,构成分布式控制的数字控制伺服系统日益受到人们的重视。基于现场总线的分布式伺服系统有很多优点,如连线少、可靠性高、易于系统的维
2011-01-19 10:19:111513 
伺服系统(servomechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制的非常灵活方便。
2011-03-04 15:59:35154 传统 PID控制 在伺服系统高精度位置跟踪和改善系统品质方面已露出诸多不足,且系统中存在的控制干扰和测量噪声会在很大程度上影响伺服系统的跟踪精度。提出一种带有卡尔曼滤波器
2011-07-06 16:05:35114 伺服系统按其驱动元件划分,有步进式伺服系统、直流电动机伺服系统、交流电动机伺服系统。按控制方式划分,有开环伺服系统、闭环伺服系统和半闭环伺服系统等。
2011-07-10 17:15:042298 
本文以实验室的电液位置 伺服系统 为研究对象,按照系统的控制要求,提出以ARM9(S3C2410)微处理器为核心的控制器对电液位置伺服系统进行控制的一种方案,设计了一种新型的基于ARM
2011-08-19 11:23:0851 伺服系统脉冲控制电路将产生用来控 制伺服系统 的脉冲。图示的组件显示这个伺服系统应该产生一个90的总旋转。
2011-11-03 16:33:193474 用液压元件组成的伺服系统(什么是伺服系统)称为液压伺服系统,并且液压伺服系统具有易于实现直线运动的速度位移及力控制,驱动力、力矩和功率大,尺寸小重量轻,加速性能好,响
2012-02-09 10:05:337075 
针对传统方法难以整定船载雷达伺服系统PID参数的问题,将模糊参数自整定PID控制威廉希尔官方网站
应用到伺服系统位置回路中,通过仿真实验表明该方法可以不依赖系统的数学模型,而根据输入输
2013-07-25 17:47:0328 伺服系统的PID控制威廉希尔官方网站
下载
伺服系统的PID控制威廉希尔官方网站
下载
2015-12-09 16:46:538 位置伺服系统PID控制策略研究与应用-2010。
2016-04-01 14:49:5617 音圈电机伺服系统模糊PID控制-2010。
2016-04-06 14:21:4918 交流永磁伺服系统威廉希尔官方网站
讲座第六讲_八_交流永磁伺服系统的控制策略。
2016-04-26 10:47:0820 交流永磁伺服系统威廉希尔官方网站
讲座第六讲_九_交流永磁伺服系统的控制策略
2016-04-26 10:47:089 交流永磁伺服系统威廉希尔官方网站
讲座第六讲_七_交流永磁伺服系统的控制策略
2016-04-26 10:47:0821 交流永磁伺服系统威廉希尔官方网站
讲座第六讲_十_交流永磁伺服系统的控制策略
2016-04-26 10:47:0810 交流永磁伺服系统威廉希尔官方网站
讲座第六讲_十二_交流永磁伺服系统的控制策略。
2016-04-26 10:47:0818 交流永磁伺服系统威廉希尔官方网站
讲座第六讲_十一_交流永磁伺服系统的控制策略
2016-04-26 10:47:0810 交流永磁伺服系统威廉希尔官方网站
讲座第四讲_伺服系统的组成_三_
2016-04-26 10:47:0818 电液伺服系统位置与压力控制转换过程的加减速算法与仿真
2016-05-03 14:23:268 变加减速算法在位置伺服系统中的应用与分析
2016-05-04 14:37:0110 电液伺服系统位置和力模糊切换控制方法_高炳微
2017-01-07 17:01:100 模糊控制及其在液压伺服系统中的应用_余兵
2017-02-07 16:59:251 伺服系统,亦称随动系统,是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度或力输出的自动控制系统。大多数伺服系统具有检测反馈回路,因而伺服系统是一种反馈控制系统。
2017-06-12 16:01:227159 根据伺服系统的特点并结合PID控制算法设计了一种位置前馈控制器
2017-09-16 09:08:2120 基于DSP控制的电液位置伺服系统电模拟仿真研究
2017-10-19 14:33:268 首先从直流位置伺服系统出发,阐迷系统的基本结构和伺服性能指标,着重讨论半闭环结构直流位置伺服系统的组成、控制原理和控制方法。它们是后续章节进一步讨论交流位置伺服系统的基础。 随着现代科学威廉希尔官方网站
的飞速发展,特别是
2017-11-08 09:59:217 到电液伺服系统的主位置闭环内,以实现阀控缸系统位置和压力的主从控制。通过在MAT-LAB/Simulink中搭建的仿真模型,仿真分析该方法的控制效果,结果表明该控制方法正确可行。通过分析现场样机矫直钢板时液压缸的位置和压力信号,证明电液伺
2018-03-13 11:35:360 本文开始介绍了伺服系统的概念和伺服系统主要作用,其次阐述了伺服系统的分类与基本要求,最后阐述了伺服系统主要特点和基本组成结构。
2018-03-27 08:43:2418096 本文主要介绍什么是伺服系统,首先介绍了伺服系统的结构及特点,其次介绍了伺服系统作用、分类及性能要求和参数,最后阐述了伺服系统的发展趋势。
2018-04-28 17:08:5632921 现代交流伺服系统,经历了从模拟到数字化的转变,数字控制环已经无处不在,比如换相、电流、速度和位置控制;采用新型功率半导体器件、高性能DSP加FPGA、以及伺服专用模块(比如IR推出的伺服控制专用引擎)也不足为奇。本文主要介绍了现代交流伺服系统原理及控制方法,具体的跟随小编一起来了解一下。
2018-05-02 10:17:026166 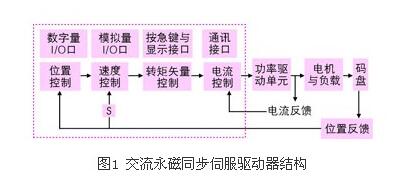
本文首先介绍了伺服系统的组成,其次介绍了伺服系统的特点、作用及分类,最后阐述了伺服系统应用领域、应用趋势及实例,具体的跟随小编一起来了解一下。
2018-05-31 10:35:0315589 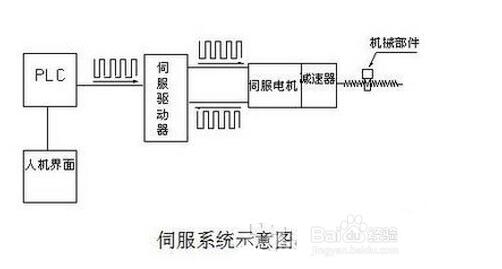
本文首先介绍了伺服系统的结构组成,其次介绍了伺服系统设计要求,最后介绍了伺服系统设计步骤及方法,具体的跟随小编一起来了解一下。
2018-05-31 11:05:516102 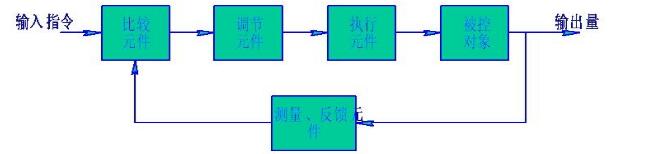
本文主要详解主轴伺服系统,首先介绍的是主轴伺服的作用,其次介绍了主轴伺服系统的故障的表现形式,最后阐述了主轴伺服系统的故障诊断方法,具体的跟随小编一起来了解一下。
2018-06-01 11:08:145858 本文首先介绍了伺服系统威廉希尔官方网站
的要求,其次阐述了伺服系统复合控制威廉希尔官方网站
和非线性补偿威廉希尔官方网站
,最后介绍了伺服系统常用的线性补偿,具体的跟随小编一起来了解一下。
2018-06-01 12:59:563974 本文主要详解基于自抗扰控制的双环伺服系统,分别从ADRC抗干扰机理、伺服系统自抗扰控制、仿真研究以及实验结果四个方面详细解析,具体的跟随小编一起来了解一下。
2018-06-01 14:44:287452 
这种方式与步进电机的控制方式类似,运动控制器给伺服驱动器发送“脉冲/方向”或“CW/CCW”类型的脉冲指令信号;伺服驱动器工作在位置控制模式,位置闭环由伺服驱动器完成。日系伺服和国产伺服产品大都采用这种模式。其优点是系统调试简单,不易产生干扰,但缺点是伺服系统响应稍慢。
2019-02-17 11:16:2710987 ;伺服驱动器工作在位置控制模式,位置闭环由伺服驱动器完成。日系伺服和国产伺服产品大都采用这种模式。其优点是系统调试简单,不易产生干扰,但缺点是伺服系统响应稍慢。 2、模拟信号 这种方式下,运动控制系统给伺服驱动器发送+/-10V的模
2020-06-12 14:45:485452 伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
2019-10-30 09:44:475961 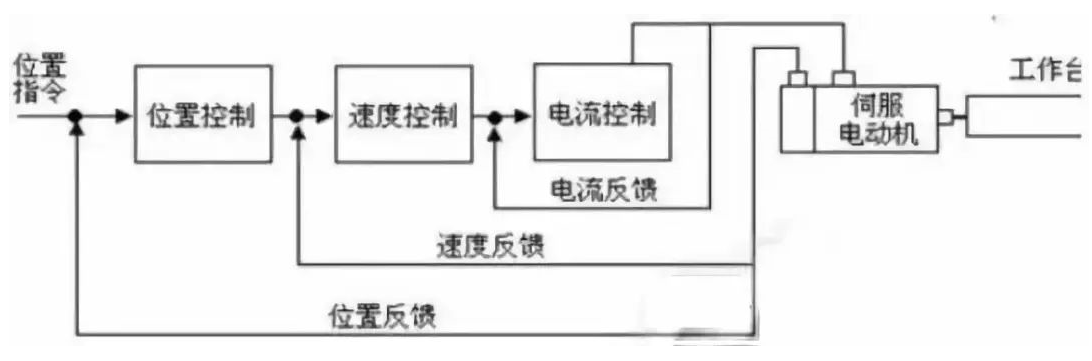
针对交流伺服运动控制系统,在PMSM 伺服系统电流环和速度环的基础上,进行位置环设计,保证伺服电机位置跟踪的精确性。同时,利用S 曲线加减速算法进行速度规划,减小电机在加减速过程中的机械振动,以保证
2020-07-16 17:32:2155 基于DSP的永磁交流伺服控制系统开发(通信电源威廉希尔官方网站
2017)-基于DSP的永磁交流伺服控制系统开发 本论文在分析了PMSM的结构、运动原理及数学模型的基础上,系统地阐述了PMSM交流伺服系统矢量
2021-09-28 09:58:0817 伺服系统是自动化生产里面的执行机构,各类机械手想要做功,离不开伺服系统的帮助。伺服系统相比以往的其他电机,最大的优点就是控制的精度高,因为其拥有编码器结构,可以实现闭环控制。作为伺服系统的主体,运动
2022-06-02 14:32:292869 伺服系统是一种自动控制系统,能使物体的位置、方位、状态等输出被控量跟随输入目标(或给定值)的变化而变化。伺服驱动器在接收下达的控制命令后,会发出信号给伺服电机驱动其转动;
2022-11-07 15:02:5113128 伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
2022-11-21 20:54:481923 伺服系统的工作原理 伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意
2023-02-08 14:11:461788 交流伺服系统通常由以下几个主要组成部分构成:
交流伺服电机:交流伺服电机是伺服系统的核心部件之一,它的转速、力矩和位置等运动状态能够受到精密控制。常用的交流伺服电机有感应电机和永磁同步电机等。
2023-03-07 14:15:362660 以下是交流伺服系统设计时的一些指南:
选择合适的电机类型:交流伺服电机有不同类型,如感应电机、永磁同步电机等。应根据具体应用场景选择合适的电机类型,以确保其性能和控制效果。
2023-03-07 14:18:55666 交流伺服系统按照电机类型的不同可以分为两种:异步伺服系统和同步伺服系统。根据控制器的不同,交流伺服系统又可以分为模拟伺服系统和数字伺服系统。
2023-03-07 14:20:44949 机电伺服系统广泛应用于各种机械设备中,其种类和形式多种多样。以下列举一些常见的机电伺服系统:
伺服电机系统:伺服电机系统是一种利用电机控制机械运动的伺服系统,它通常包括电机、编码器、控制
2023-03-07 14:31:081421 什么是伺服系统?以物体的位置、方向、状态等为控制量,以跟踪输入目标值(或给定值)的任意变化为目的,所构成的自动控制系统。
2023-05-04 11:44:56804 
一个多轴运动控制系统由高阶的运动控制器(motioncontroller)与低阶的伺服驱动器(servodriver)所组成,运动控制器负责运动控制命令译码、各个位置控制轴彼此间的相对运动、加减
2023-05-09 10:56:39973 
伺服系统指经由闭环控制方式达到对一个机械系统的位置、速度和加速度的控制。
一个伺服系统的构成包括被控对象、执行器和控制器(负载、伺服电动机和功率放大器、控制器和反馈装置)。
1. 执行器的功能
2023-05-16 14:46:430 伺服系统主要由伺服控制器、驱动电路、伺服电动机及相应反馈检测器件组成。1.伺服系统原理当人为的给定控制信号并被伺服控制系统接收时,执行机构就会按照控制信号的指令进行一系列的运动和动作;如果不再
2023-08-27 08:08:421729 
伺服系统主要由伺服驱动器、编码器和伺服电机等部件构成。伺服系统是一种自动控制系统,能使物体的位置、方位、状态等输出被控量跟随输入目标(或给定值)的变化而变化。伺服驱动器在接收下达的控制命令后,会发
2023-08-27 08:08:511266 伺服系统(servomechanism)又称 随动系统 ,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化
2023-09-27 10:30:361296 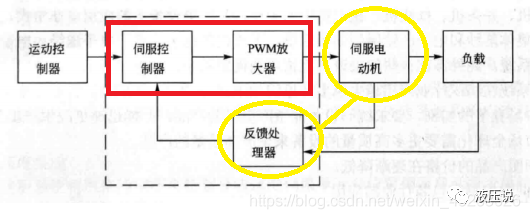
针对高动态性能、高稳态精度的伺服系统,设计了有限时间位置控制器,实现了系统在变化的位置指令下,柔顺地从当前位置运动至目标位置。
2023-10-18 11:39:47456 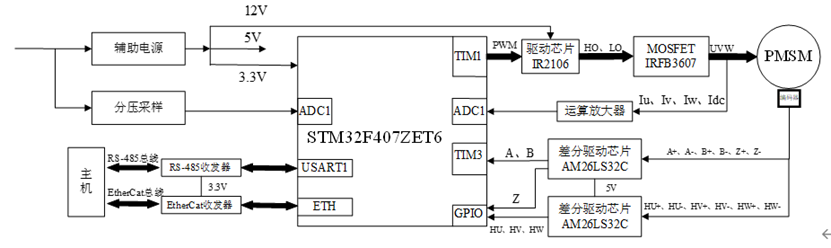
交流伺服系统的分类及应用场合交流伺服系统按照电机类型的不同可以分为两种:异步伺服系统和同步伺服系统。根据控制器的不同,交流伺服系统又可以分为模拟伺服系统和数字伺服系统。异步伺服系统:异步伺服系统
2023-11-03 08:07:41522 伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统
2023-12-05 10:25:03479
 电子发烧友App
电子发烧友App












 工商网监
工商网监
评论