 电子发烧友App
电子发烧友App


五相混合式步进电动机走步均匀性分析
文章对五相混合式步进电动机采用下桥臂电流恒定不变式恒流斩波驱动时的步进均匀性进行了详细分析,针对存在的不足,提出了下桥臂电流恒定值可变式恒流斩流驱动方案。?
关键词:混合式步进电动机;斩波;驱动电路
Step Uniformity Analysis for 5phase Hybrid Step Motor
WANG Youjun
(Institute of Sciences, PLAUST, Nanjing 210016, China)
Key words: hybrid step motor; chopping; driving circuit
开环工作方式下,步进电动机走步的均匀性与驱动电路形式密切相关。五相混合式步进电动机主电路驱动控制方式有升频升压驱动和定压恒流斩波等驱动方式,定子绕组联接有五相星接、五边形联接和五相全H桥联接三种方式。定压恒流斩波驱动适合于对高速力矩和抗冲击性有高要求的场合。实践中发现:驱动主电路采用下桥臂电流恒定值不变式定压恒流斩波,定子绕组五边形联接时,电机在低频率下运行,有走步不均匀性现象。本文对此进行了详细分析,并提出了下桥臂恒流值可变式恒流斩波驱动方案。
 ?
? 式中N—每相绕组的串联匝数;NI—每相绕组的磁动势;Z2—转子的齿数;θ—矩角;Ad—直轴磁导;Aq—交轴磁导。
电磁转矩最大值Tmax与每相绕组磁动势(或相电流)的平方成正比,所以步进电动机属于对绕组电流十分敏感的传动电动机。

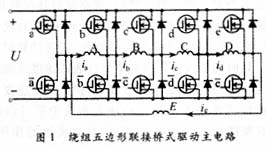
主电路如图1示,下桥臂电流恒定值固定为相绕组额定电流的两倍2I。以半步运行为例,4-5励磁的20种通电状态中4相励磁与5相励磁交替进行,根据环分控制逻辑不难分析,主电路稳态等值电路基本结构为4拍一循环,所以单步响应特性也是4拍一循环。混合式步进电动机的驱动控制主要体现为对转矩矢量的控制,而绕组电流又直接与转矩相关。以一相绕组通以额定电流I产生的定位转矩T为基准,首先分析相邻4拍 绕组电流及其相应派生定位转矩矢量的变化规律。

派生定位转矩矢量为:

派生定位转矩矢量为

派生定位转矩矢量为
 ?
?

从以上分析可以看出:派生定位转矩矢量变化不均匀,表现在大小上不一样,转矩波动相当明显,最大值是最小值的2.15倍;相位变化也不均匀,5相励磁产生了附加步距误差。这些因素反映在步进电动机低频运行时,走步有明显的“强”“弱”或“重”“轻”,加剧了电机的低频震荡,这对低速工作是不利的,另外步矩角的不均匀也影响到系统的脉冲当量。
派生定位转矩矢量为:
派生定位转矩矢量为
派生定位转矩矢量为
? 从以上分析可以看出:派生定位转矩矢量变化不均匀,表现在大小上不一样,转矩波动相当明显,最大值是最小值的2.15倍;相位变化也不均匀,5相励磁产生了附加步距误差。这些因素反映在步进电动机低频运行时,走步有明显的“强”“弱”或“重”“轻”,加剧了电机的低频震荡,这对低速工作是不利的,另外步矩角的不均匀也影响到系统的脉冲当量。
若改下桥臂恒流斩波的电流恒定值随绕组励磁状态变化,可以改善定位转矩矢量变化的均匀性。具体分析如下。

条件:B相下桥臂恒流斩波的电流恒定值为2I;D相下桥臂恒流斩波的电流恒定值为1.5I。各相绕组电

条件:D相下桥臂恒流斩波的电流恒定值为2I;B相下桥臂恒流斩波的电流恒定值为1.5I。各相绕组电

条件:D相下桥臂恒流斩波的电流恒定值为2I;A、E相下桥臂恒流斩波的电流恒定值为I;各相绕组电

由以上分析不难看出,派生定位转矩矢量变化的均匀性得到较大改善,转矩波动相当小,最大值仅是最小值的1.11倍,且无附加步距误差。
条件:B相下桥臂恒流斩波的电流恒定值为2I;D相下桥臂恒流斩波的电流恒定值为1.5I。各相绕组电
条件:D相下桥臂恒流斩波的电流恒定值为2I;B相下桥臂恒流斩波的电流恒定值为1.5I。各相绕组电
条件:D相下桥臂恒流斩波的电流恒定值为2I;A、E相下桥臂恒流斩波的电流恒定值为I;各相绕组电
由以上分析不难看出,派生定位转矩矢量变化的均匀性得到较大改善,转矩波动相当小,最大值仅是最小值的1.11倍,且无附加步距误差。
按照改进方案,每相下桥臂恒流斩波的电流恒定值随绕组励磁状态变化,在下桥臂开通时根据励磁状态不同有I、1.5I和2I三种取值,电路如图3,通过开关切换改变电阻分压值得到所要求的电流设定值。interwetten与威廉的赔率体系
开关k1a和k2a可采用CD4066集成电路实现。

由式(1)可确定电阻R?0和R?1的阻值。
k1ak2a=10时,比较器U“+”端门限值为

由上式可确定电阻R3的阻值。
表1为整个五相电流控制开关与环分信号对应的开关真值表。某相下桥臂未开通时,表中的逻辑值为随意值。开关真值表可结合环分信号用EPROM或CPLD等器件来实现。




相关推荐
步进电动机及其控制方式
知识架构框图一、步进电动机简介1、步进电机主要功能1、步进电动机(Stepping Motor,或 Step Motor 、Stepper Motor)是一种可由电脉冲控制运动的特殊电动机,可以通过
2021-06-29 07:40:00
步进电动机基础知识
。步进电动机的种类 根据励磁式方式的不同分为:反应式、永磁式和混合式(又叫感应子式)三种。反应式步进电机的应用较多。下面以反应式步进电机为例
2008-11-19 23:54:15
步进电动机是如何工作的
,从而达到精确定位的目的;同时还可以通过控制脉冲频率来控制电动机转动的速度和加速度,从而达到调速的目的。一:线、相、极性的概念“相” 就是说明步进电机有几个线圈(也叫做绕组)。“线” 就是说明步进电机有
2021-08-31 07:53:31
步进电机14问
度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。这种步进电机的应用最为
2014-01-21 14:55:59
步进电机有哪几种类型?
类型。混合式步进电机将前两类步进电机的优点综合于一身。混合式步进电机根据线圈极数可分为 两相、三相、五相步进电机。两相混合式步进电机目前应用最为广泛。常见的两相混合式步进电机的定子...
2021-07-08 09:34:00
步进电机的选型
、57、86、110等3、步进电动机构造:由转子(转子铁芯、永磁体、转轴、滚珠轴承),定子(绕组、定子铁芯),前后端盖等组成。最典型两相混合式步进电机的定子有8个大齿,40个小齿,转子有50个小齿;三相电机的定子有9个大齿,45个小齿,转子有50个小齿。4、步进电动机主要参数步进电机的相数:是指电机
2021-06-28 13:06:37
D306型号三相伺服混合式步进电机驱动器具有哪些特点?怎样去使用它?
单片机步进电机控制器是什么?怎样去制作一种单片机电动机控制器?D306型号三相伺服混合式步进电机驱动器具有哪些特点?怎样去使用D306三相混合式步进电机驱动器?
2021-07-13 08:09:56
stm32控制步进电机加速度
Driver驱动高精度系列二相混合式步进电机多细分驱动器1、使用说明:1、VCC&GND:20~40V DC; 2、A+A- B+B-:接二相混合式步进电机的2相; 3、工作额定电流:3A;...
2021-07-08 07:29:05
【原创分享】步进电机介绍、分类及应用中的问题探讨
同步电机等电机中的应用有较多的研究,相关文献较多。混合式步进电机与永磁凸极同步电动机在作用机理上相似,虽有不同之处,但从本质上,混合式步进电机可以说是一种低速凸极永磁同步电机,混合式步进电机控制可以
2021-09-10 08:45:23
【案例分享】两相混合式步进电机驱动平台开发进阶
,得认清女人的类别,挑一类自己好口的进行针对性的进攻这样方可告捷啊。于是就百度啊google啊,得到以下结论:步进电机分三种:永磁式(PM)、反应式(VR)和混合式(HB)。永磁式步进一般为两相,转矩
2019-07-27 04:30:00
两相四线混合式步进电机用双H桥驱动电路之Multisim仿真及优化 相关资料推荐
1. 仿真图2. 驱动电路原理解析2.1 两相四线混合式步进电机驱动原理首先给出两相四线混合式步进电机的整步驱动顺序图。可以看出,两相驱动电压的相位差为90°,因此,第一节中驱动电路的两个脉冲电压源
2021-07-08 07:24:12
二相混合式步进电机开环细分控制simulink建模仿真含模型文件
细分原理二相混合式步进电机电磁转矩方程p-转子级数;Zr-转子齿数Zr=2*p;Ta-a相电磁转矩;Tb-b相电磁转矩;Td-定位矩(关于二相混合式步进电机的数学模型可参见我的另一篇博客https
2020-06-14 22:33:19
二相混合式步进电机电磁转矩的原理是什么?
细分原理二相混合式步进电机电磁转矩方程p-转子级数;Zr-转子齿数Zr=2*p;Ta-a相电磁转矩;Tb-b相电磁转矩;Td-定位矩(关于二相混合式步进电机的数学模型可参见我的另一篇博客https
2021-07-08 09:59:07
二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)
; θ、ω 分别为电机转动角度及转动角速度; Nr 为转子齿 数; Te 为混合式步进电动机的电磁转矩; J、B 分别为 负载转动惯量和粘滞摩擦系数。电流环部分传递函数实际运行中,二相混合式步进电动机旋转反电 势调节
2020-06-14 22:35:18
二相混合式步进电机,锁步时电流声音很大,驱动器是lv8729v,细分设置为2,单片机是stc15系列的。
如题目描述,二相混合式步进电机,锁步时电流声音很大,驱动器是lv8729v,细分设置为2,单片机是stc15系列的。但并不是所有锁步的时候电流声音都大,会间隔出现,而且总是在某一次运动之后才会有。不知道是什么原因造成的,求大神指点。
2016-12-21 10:09:33
于MATLAB/Simulink的二相混合式步进电机的建模与仿真
上图中的Te仿真中有两个小错误,正确方程应为:模型文件名为:model_of_Two_phase_Hybrid_stepping_motor.slx(2019b)参考文献:基于MATLAB/Simulink的二相混合式步进电机的建模与仿真
2021-08-31 06:13:04
介绍一种两相四线混合式步进电机用双H桥驱动电路
下图为两相四线混合式步进电机用双H桥驱动电路。图中Ra、La、Rb、Lb分别为两相四线混合式步进电机的两相电阻及电感参数。
2021-07-07 07:15:42
伺服电机与步进电机的不同点是什么
,即其脉冲当量为360度/131072=0.00274658度,是步距角为1.8度的步进电机脉冲当量的1/655.2.低频特性不同两相混合式步进电动机在低速运转时易出现低频振动现象(因为步进电机是...
2021-06-28 09:56:07
基于单片机的通用型五相混合式步进电机驱动器设计
分析了电脑绣花机系统中,现有的五相混合式步进电机驱动器存在低频转矩振荡、高频输出转矩不足和多电源供电及不通用等诸多不足之处的基础上,设计出一种基于单片机的通用型五相混合式步进电机驱动器.该驱动器
2011-03-07 12:15:26
如何控制步进电动机的角位移量
来控制电机的角位移量,从而达到精确定位的目的;同时还可以通过控制脉冲频率来控制电动机转动的速度和加速度,从而达到调速的目的。一:线、相、极性“相” 就是说明步进电...
2021-08-31 07:39:02
常见的电动机故障有哪些?
影响散热效果,致使电动机过热,所以要及时铲除堵塞物,改善散热条件。 4、电动机工作动态反常 电动机正常工作时,动态是均匀的、无杂音,当出现轴承损坏、断相工作表象时,就会宣告反常的、乃至是尖锐的响声
2015-08-15 14:59:40
应用LABVIEW软件建立虚拟仪器测量程序,设计一套五相感应电动机的线(相)电压、电流、有功功率、无功功率测量系统
多相感应电动机广泛应用于重载、船舶驱动场合,可以降低每相功率的等级,有利于多相变频器电气电子元器件的选择与运行,且可以在有一相出现故障时可以断开故障相继续运行。五相感应电动机是一种典型的多相电机。五
2020-06-18 20:07:56
控制步进电动机
单位要改造仪器,由于原来的电动机无法满足低速的时候,达到需要的扭矩的大小,需要改造,步进电动机是个不错的选择,现在有2个方案,一个是用labview做上位机编写脉冲源,通过串口程序连接步进电动机
2014-05-03 19:09:58
永磁电动机的结构形式是什么样?
永磁电动机的形式有:(1)矩形脉冲波电流,永磁无刷直流电动机PMBDC具有矩形脉冲波电流。(2)正弦波电流,永磁磁阻同步电机PSM具有正弦波电流。(3)混合式永磁电机。
2019-09-24 09:11:26
菜鸟 求助
pic单片机 驱动 57BYGH56 1.2N 两相混合式 或 87步进电动机,外围电路需要什么电子元件?怎么连接?用5个I/O口引出排针引出控制得不?还需要其他元件吗?有详细原理图吗?刚学pic单片机,没连接过电动机外围电路,求助各位高手,谢谢!
2011-04-25 18:24:43
请问ULN2003是如何驱动步进电机28BYJ-48的?
ULN2003是如何驱动步进电机28BYJ-48的?四相步进电机有哪几种常见的通电方式?什么是步进电机?步进电机分为哪几种?什么是DETENT TORQUE?如何克服两相混合式步进电机在低速运转
2021-10-13 09:04:55
非均匀分布式放大器拓扑结构与混合式英国威廉希尔公司网站 有什么不同?
`如何运用非均匀分布式功率放大器去设计MMIC?如何运用混合式英国威廉希尔公司网站
去设计MMIC?两者有何不同?`
2021-04-12 07:17:56
步进电动机的应用实例
步进电动机概述步进电动机工作原理及线性解析步进电动机的研究设计计算方法步进电动机动态特性的基础理论步进电动机的驱动步进电动机的环境分配器步进电
2007-11-16 23:41:48 714
714
714三相混合式步进电机驱动器B3C的工作原理
三相混合式步进电机驱动器B3C的工作原理根据正弦电流细分驱动的原理,设计出三相混合式细分型步进电机驱动器,系统采用电流跟踪和脉宽调制威廉希尔官方网站
,使电机的相电流为相位相
2008-12-19 01:36:33136
136集成位置传感器用于混合式步进电动机位置的检测
混合式步进电动机伺服系统转子的位置检测,可以用传统的外配位置传感器或基于理论算法的无位置传感器方案,但是存在许多问题。文章给出了一种新型的集成位置传感器的设计
2009-06-23 09:21:2022
22两相混合式步进电机驱动芯片BY-5064使用说明
两相混合式步进电机驱动芯片BY-5064使用说明:BY-5064是一款小型化、高细分、多功能、使用方便的两相混合式步进电机驱动芯片,配合简单的外围电路即可实现高性能的驱动电路。该
2009-09-29 10:41:5163
63THB6128中文资料,pdf (高细分两相混合式步进电机驱
THB6128 高细分两相混合式步进电机驱动芯片:一、特性:●双全桥MOSFET驱动,低导通电阻Ron=0.55Ω●最高耐压36VDC,大电流2.2A(峰值)●多种细分可选(1、1/2、1/4、1/8、1/1
2009-10-27 18:29:42259
259二相混合式步进电机驱动器的优化设计
二相混合式步进电机驱动器的优化设计:从 改善步进电机动静态性能的角度出发,给出了基于8051的二相混合式步进电机驱动器的优化设计方案,主要介绍了系统结构、通讯策略、
2010-01-14 09:44:21100
100SH-20403两相混合式步进电机细分驱动器
SH-20403两相混合式步进电机细分驱动器
驱动器内部的开关电源设计保证了可以适应较宽的电压范围,用户可根据各自的情况在10V到40V DC之间选择。
2010-05-11 11:59:29138
138CPLD器件在两相混合式步进电动机驱动器中的应用
文章详细介绍了一种以Xilinx 公司生产的CPLD 器件XC9536 为核心来产生电机绕组参考电流, 进而实现具有绕组电流补偿功能的两相混合式步进电动机10 细分和50 细分运行方式的方法。
2010-10-27 15:31:5754
54
三相混合式多细分步进电机驱动器
三相混合式多细分步进电机驱动器
本文根据正弦电流细分驱动的原理,设计出三相混合式多细分步进电机驱动器。系统采用电流跟跟踪和脉宽调制威廉希尔官方网站
,使用电机的相
2010-02-22 10:58:09 2133
2133
2133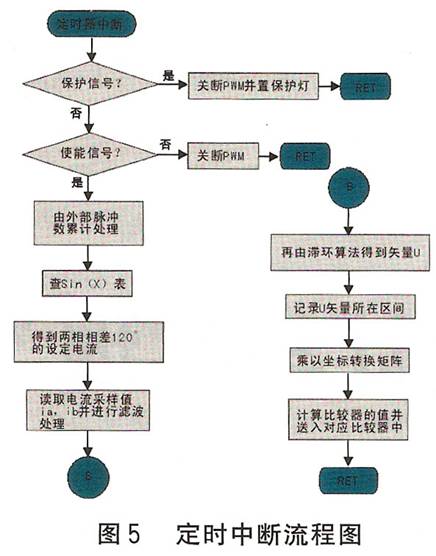
混合式步进电动机的谐波电磁转矩分析
研究了五相混合式 步进电动机 的不对称性, 分析了不对称性与3 次谐波电流对电动机谐波电磁转矩的影响, 提出了不对称性可在电动机的反电动势中体现, 且导致电动机产生较大的2 次谐
2011-08-17 18:09:5735
35基于L297的混合式步进电机驱动器的研制
在分析了步进电机的驱动特性和斩波恒流细分驱动原理和混合式步进电机驱动芯片L297/298的性能、结构的基础上,结合8751单片机,设计出了混合式步进电机驱动器.实测表明,此细分
2011-09-27 16:25:0674
74
基于STM32F103RB的两相混合式步进电机细分驱动器设计
根据两相混合式步进电机细分驱动原理,设计了一种基于STM32F103RB单片机的、细分度可调的步进电机驱动器。控制器采用电流矢量控制算法,通过双H桥驱动步进电机的两相转子。利用片
2012-06-13 14:29:36239
239基于FPGA的二相混合式步进电机控制系统
随着现代卫星载荷探测功能日益增强,对电机等活动部件的寿命与可靠性提出更高要求。步进电机自身具有体积小、质量轻、易于控制、误差不积累、可靠性高等优点,适合充当星上载荷活动部件。本文中使用一款两相混合式
2017-11-07 09:21:460
0HB型混合式步进电机的结构和工作原理详解
混合式(即HB型)步进电机有两相、三相、五相式,转子因与相数无关,而采用相同转子,本文以两相HB型混合式步进电机为例加以说明。HB型的名称由其转子结构得来,其转子是PM型永磁步进电机与VR型变磁阻
2018-04-25 10:04:0519114
19114一文看懂HB混合式步进电机与相数、转子齿数、主极数的关系
混合式步进是指混合了永磁式和反应式的优点,分为两相和五相,两相步进角一般为1.8度而五相步进角一般为 0.72度,这种步进电机的应用最为广泛。本文主要解析HB型混合式步进电机与相数、转子齿数、主极数的关系,首先介绍的是步进电机相数、转子齿数和主极数的表达式,其次介绍了相内及相间磁路的一般形式。
2018-04-25 10:23:1615161
15161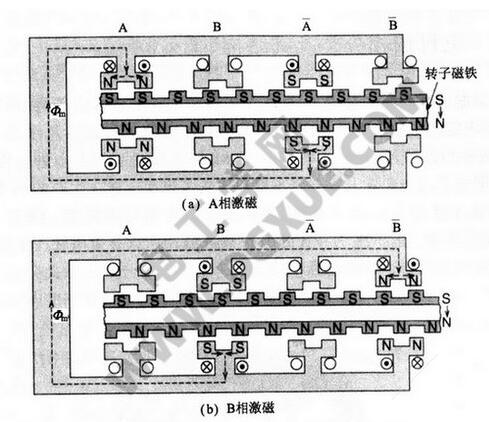
什么是混合式步进电机_混合式步进电机和反应式步进电机的区别
转动一个固定的角度(即步进角)。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。那么什么是混合式步进电机,混合式步进电机和反应式步进电机有什么区别吗?接下来跟随小编详细的来了解一下混合式步进电机。
2018-04-25 10:59:1115747
15747步进电动机的作业原理图
绕组,构成三对磁极;转子上则均匀散布着4个齿。步进电动机选用直流电源供电。当U、V、W三相绕组轮番转电时,经过电磁力的招引,步进电动机转子一步一步地旋转。
2020-04-19 09:10:151459
1459设计 | 两相混合式步进电机H桥驱动电路设计原理
H桥功率驱动电路可应用于步进电机、交流电机及直流电机等的驱动。永磁步进电机或混合式步进电机的励磁绕组都必须用双极性电源供电,也就是说绕组有时需正向电流,有时需反向电流,这样绕组电源需用H桥驱动。本文以两相混合式步进电机驱动器为例来设计H桥驱动电路。
2021-01-31 06:21:3529
29
步进电机驱动器的分类及模块
。对步进电动机驱动器的研究几乎是与步进电动机的研究同步进行的 步进电机驱动器模块 1、爬山复位 2、自动控制 3、手动微调 4、方向和限位处理 5、逻辑输出 步进电机驱动器的分类 1.永磁式步进电动机 2.两相混合式步进电机驱动器 3.三相
2021-10-02 18:10:009033
9033伺服电动机控制威廉希尔官方网站 与步进电动机的区别
量是电动机的转角或速度、力矩。伺服电动机有直流电动机和交流电动机、直线电动机和混合式伺服电动机也都是闭环控制系统,也属于伺服电动机。
2022-11-01 14:17:43776
776混合式步进电机的结构和工作原理
此前已经以PM型步进电机为例介绍了步进电机的工作。本文将介绍当今应用广泛的混合式步进电机的结构和工作原理。混合式步进电机的结构,混合式步进电机是兼具VR型和PM型电机优点的步进电机。
2023-02-24 09:51:101218
1218
两相混合式步进电机的工作原理
两相混合式步进电机的物理结构通常情况下一般主要分为定子和转子。其轴向结构如图 2-4所示。定子结构的部分有铁芯和绕组等有关组成而转子结构的部分有铁芯和转轴。通过磁体产生的磁场,将两段铁芯磁化成两极性,都各有50个小齿,而且在设计时错开了1/2齿。
2023-03-01 10:09:021778
1778
混合式步进电机工作原理及特点
混合式步进电机(Hybrid Stepper Motor)是目前应用较广泛的一种步进电机,其工作原理是将永磁式和可变磁阻式两种原理结合在一起。
混合式步进电机的转子由多个磁极组成,通常
2023-03-08 16:10:341801
1801混合式步进电机本体建模
两相混合式步进电机数学模型 式中 Ls为自感,它与转子的机械角位置 θ 有关。 由于混合式步进电机中磁芯造成很大的气隙, 其可变磁阻对于输出总力矩的贡献可以忽略,式 (2)作为单相绕组等效电路
2023-03-22 09:52:400
0二相混合式步进电机闭环矢量控制simulink仿真
目录在位置跟踪伺服系统中二相混合式步进电机闭环矢量控制simulink仿真 闭环矢量控制系统simulink图 闭环矢量控制系统系统结构框图 二相混合式步进电机的数学模型 矩角特性 电压方程
2023-03-24 10:30:591
1反应式步进电机与混合式步进电机的区别
反应式步进电机与混合式步进电机的区别如下:
1、在结构和材料上不同,混合式电机内部具有永久磁性材料,故混合式电机有自阻(即在电机未加电的情况下有一定的自锁力),而反应式电机没有自阻。
2、在运行性能上有差别,混合式电机运行时相对较平稳,输出力矩相对较大,运行声音小。
2023-03-27 15:42:33745
745常见的两相混合式步进电机应用
的品种也非常繁多。对于工业应用来说,每转 200 步的两相混合式步进电机最为常见。这里的 “混合” 是指它利用永磁体和带齿铁转子的工作方式(例如可变磁阻电机),而 “200 步” 则指电机每步移动 1.8°,该步数为转子和定子上齿数的函数
2023-08-23 15:22:55714
714
混合式步进电机的结构图
混合式步进电机(Hybrid Stepper Motor)结合了永磁式和变极式步进电机的特点,以实现高性能和高可靠性。 合式步进电机融合了可变磁阻(VR)型步进电机和永磁(PM)型步进电机的优势
2024-02-06 10:01:46236
236





 工商网监
工商网监
评论